![[Automotive SW] Ngày 5: Giới thiệu về AUTOSAR](https://pm4u.vn/wp-content/uploads/2024/08/Leonardo_Phoenix_Create_a_background_image_with_the_word_AUTOS_1.jpg)
[Automotive SW] Ngày 5: Giới thiệu về AUTOSAR
1. AUTOSAR là gì?

AUTOSAR (Automotive Open System Architecture) là một tiêu chuẩn phát triển phần mềm cho ngành công nghiệp ô tô, ra đời vào năm 2003 bởi một liên minh của các công ty hàng đầu trong ngành ô tô như BMW, Bosch, Continental, Daimler, Ford, và Volkswagen. Mục tiêu chính của AUTOSAR là tạo ra một nền tảng tiêu chuẩn hóa cho các hệ thống điện tử và phần mềm trong ô tô, giúp giảm thiểu sự phức tạp, tăng cường khả năng tương thích và tối ưu hóa quy trình phát triển.
2. Các loại thành viên trong AUTOSAR
AUTOSAR được điều hành bởi một liên minh với các cấp độ thành viên khác nhau, cho phép các đơn vị đóng góp vào sự phát triển của AUTOSAR ở các mức độ khác nhau:
- Thành viên cốt lõi (Core Members): Đây là những thành viên sáng lập, đóng vai trò quan trọng trong việc định hình hướng đi của AUTOSAR. Bao gồm các công ty như BMW, BOSCH, Continental, Daimler, Ford và các công ty khác đã được đề cập ở trên.
- Thành viên cao cấp (Premium Members): Bao gồm các công ty tham gia phát triển công cụ, cung cấp dịch vụ, và tích cực tham gia vào cộng đồng AUTOSAR.
- Thành viên phát triển (Development Members): Đây là những đơn vị đóng góp vào quy trình phát triển, nhưng không tham gia sâu như các thành viên cốt lõi hoặc cao cấp.
3. Tại sao AUTOSAR lại quan trọng?
- Tính mở: AUTOSAR cho phép các nhà phát triển sử dụng các công cụ và phần mềm từ nhiều nhà cung cấp khác nhau, tăng tính cạnh tranh và linh hoạt.
- Khả năng tái sử dụng: Các thành phần phần mềm được phát triển theo tiêu chuẩn AUTOSAR có thể được tái sử dụng trong nhiều loại xe và nhiều thế hệ sản phẩm khác nhau.
- Độ an toàn: AUTOSAR cung cấp một khung kiến trúc vững chắc, giúp đảm bảo độ tin cậy và an toàn của các hệ thống điều khiển trong ô tô.
- Hiệu quả: Bằng cách tiêu chuẩn hóa các giao diện và các thành phần phần mềm, AUTOSAR giúp giảm thời gian và chi phí phát triển.
4. Kiến trúc phân lớp của AUTOSAR
![LSS-[24-009]-Blog-Graphic-AUTOSAR-ECU-layers-01](https://www.lhpes.com/hs-fs/hubfs/LSS-%5B24-009%5D-Blog-Graphic-AUTOSAR-ECU-layers-01.png?width=2500&height=1458&name=LSS-%5B24-009%5D-Blog-Graphic-AUTOSAR-ECU-layers-01.png)
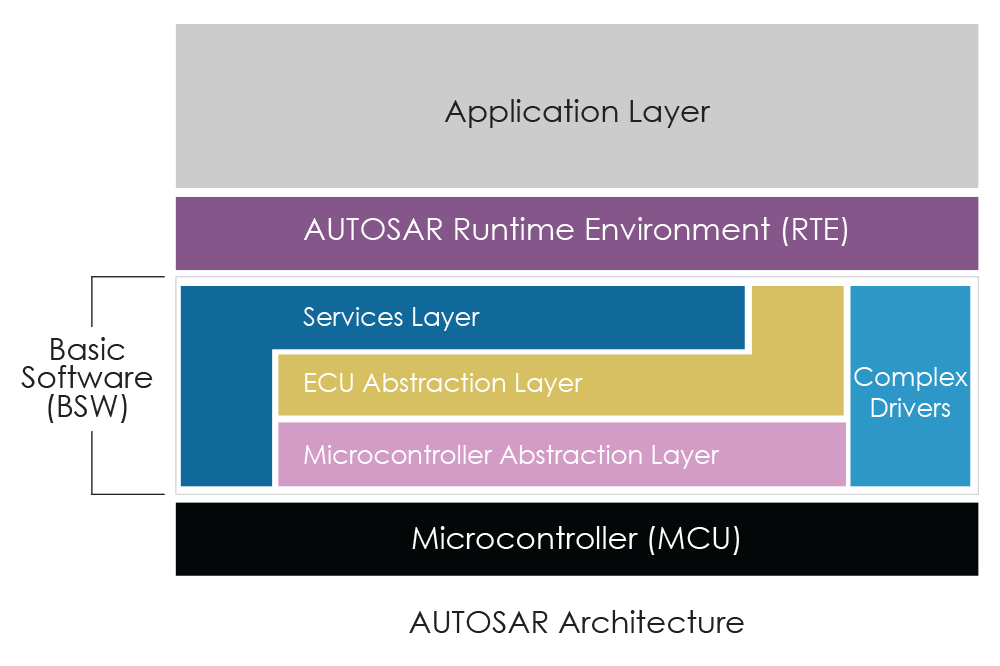
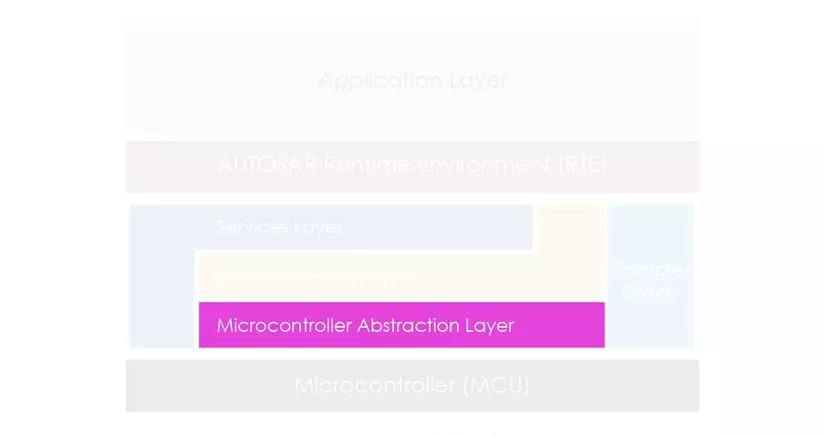
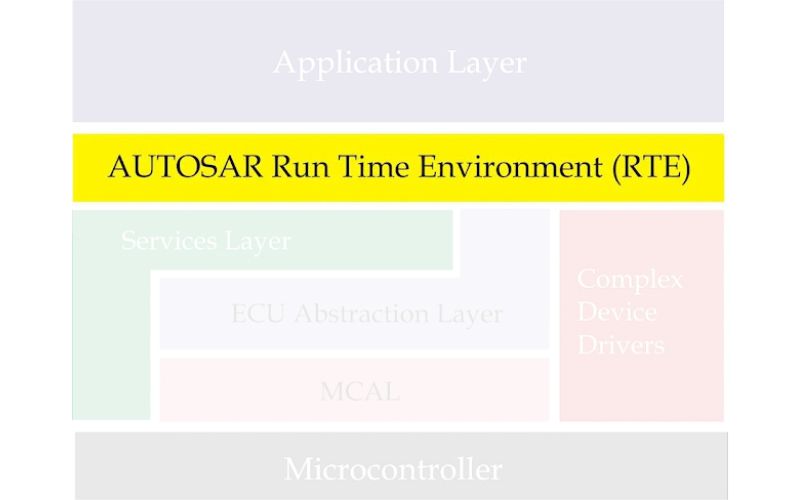
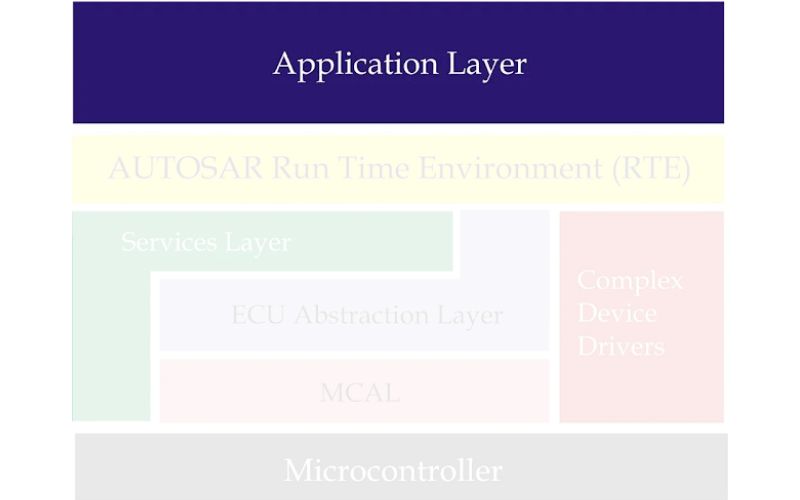
AUTOSAR triển khai một kiến trúc phân lớp tương tự như mô hình OSI (Open Systems Interconnection) được sử dụng trong lĩnh vực mạng. Kiến trúc này được thiết kế để xử lý và trừu tượng hóa các hoạt động khác nhau của mã phần mềm, cho phép phát triển theo mô-đun và dễ dàng tích hợp.
- Lớp Trừu tượng hóa vi điều khiển (Microcontroller Abstraction Layer – MCAL): Lớp này trừu tượng hóa các chi tiết phần cứng của vi điều khiển, cung cấp giao diện tiêu chuẩn cho các lớp bên trên.
- Phần mềm cơ bản (Basic Software – BSW): Bao gồm các dịch vụ như truyền thông, quản lý bộ nhớ, và quản lý đầu vào/đầu ra, đảm bảo rằng lớp phần mềm ứng dụng có thể hoạt động độc lập với phần cứng bên dưới.
- Môi trường thực thi (Runtime Environment – RTE): Lớp này đóng vai trò như một tầng trung gian, giúp giao tiếp giữa các thành phần phần mềm ứng dụng và phần mềm cơ bản.
- Lớp Ứng dụng (Application Layer): Chứa các phần mềm ứng dụng thực hiện các chức năng yêu cầu bởi hệ thống ô tô, như điều khiển động cơ, hệ thống phanh, và nhiều hơn nữa.
Lớp Phần Mềm Cơ Bản (Basic Software Layer) trong AUTOSAR
Lớp Phần Mềm Cơ Bản (BSW) là một trong ba lớp chính trong kiến trúc AUTOSAR và đóng vai trò quan trọng trong việc quản lý sự phức tạp của các hệ thống điều khiển trong ô tô.
1. Vai Trò của Lớp Phần Mềm Cơ Bản (BSW)
Lớp Phần Mềm Cơ Bản là lớp thấp nhất trong kiến trúc AUTOSAR, gần nhất với phần cứng vi điều khiển. Nó cung cấp các chức năng và dịch vụ cơ bản cho các lớp phần mềm cao hơn, bao gồm lớp Môi Trường Thực Thi (RTE) và lớp Ứng Dụng. BSW đảm bảo rằng các ứng dụng không cần phải biết chi tiết về phần cứng cụ thể mà chúng đang chạy trên đó.
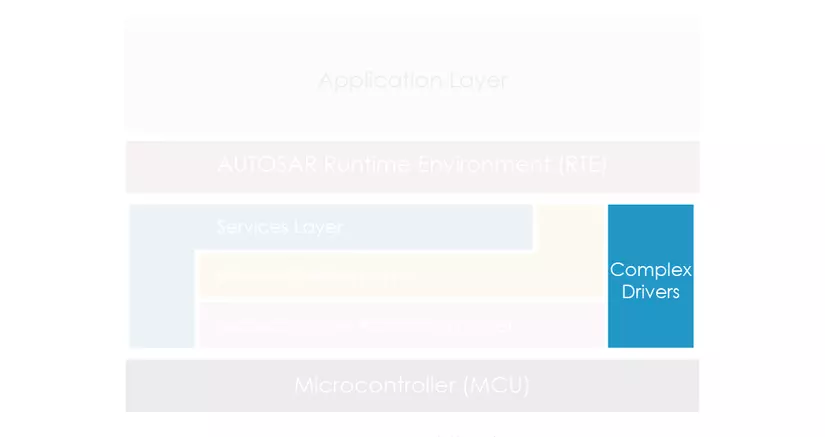
2. Các Thành Phần Chính của BSW
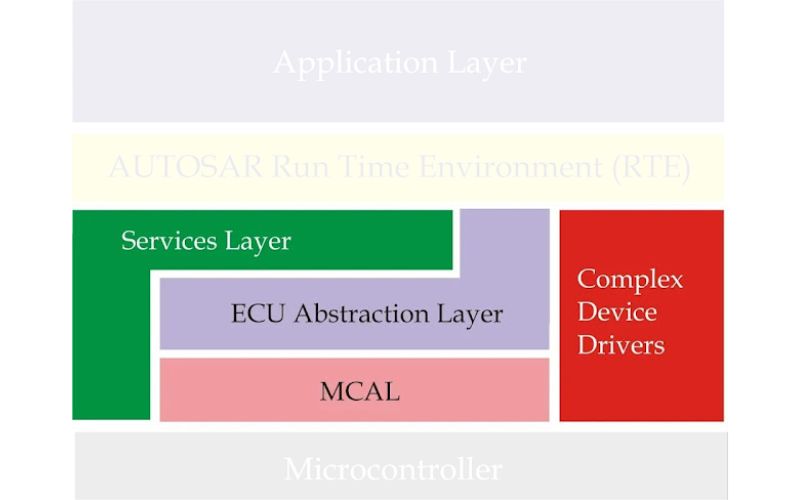
![LSS-[24-009]-Blog-Graphic-BSW-sub-layer-details-01](https://www.lhpes.com/hs-fs/hubfs/LSS-%5B24-009%5D-Blog-Graphic-BSW-sub-layer-details-01.png?width=2500&height=636&name=LSS-%5B24-009%5D-Blog-Graphic-BSW-sub-layer-details-01.png)
- Service Layer:
- Chức năng: Cung cấp các dịch vụ và chức năng cơ bản như quản lý bộ nhớ, quản lý lịch trình nhiệm vụ, và các dịch vụ chẩn đoán. Đây là lớp cung cấp các dịch vụ cần thiết cho các lớp phần mềm cao hơn và các ứng dụng.
- ECU Abstraction Layer:
- Chức năng: Cung cấp giao diện cho các driver của lớp MCAL, giúp các lớp phần mềm cao hơn không phụ thuộc vào cấu hình phần cứng ECU cụ thể. Nó hỗ trợ việc xây dựng các dịch vụ phần mềm dành riêng cho ECU mà không cần quan tâm đến cách mà các dịch vụ này được triển khai trên phần cứng.
- Microcontroller Abstraction Layer (MCAL):
- Chức năng: Cung cấp lớp trừu tượng hóa cho các phần cứng vi điều khiển, cho phép các lớp phần mềm cao hơn hoạt động mà không cần phải biết chi tiết về phần cứng cụ thể. MCAL bao gồm các driver cho các thiết bị ngoại vi nội bộ, giao tiếp, bộ nhớ, I/O, mã hóa và giao tiếp không dây.
- Complex Device Driver (CDD):
- Chức năng: Tạo điều kiện cho việc chuẩn hóa và tái sử dụng mã nguồn, bao gồm cả mã nguồn cũ. Các driver thiết bị phức tạp này giúp đảm bảo rằng các phần mềm ứng dụng có thể tương tác với các thiết bị mà không cần phải biết chi tiết về chúng.
3. Tính Năng và Lợi Ích
- Trừu Tượng Hóa Phần Cứng: BSW cung cấp lớp trừu tượng hóa cho phần cứng, giúp các lớp phần mềm cao hơn hoạt động mà không cần phải biết chi tiết về phần cứng cụ thể. Điều này giúp giảm bớt sự phụ thuộc vào phần cứng và tăng tính linh hoạt trong phát triển phần mềm.
- Tính Tương Thích và Tái Sử Dụng: BSW giúp đảm bảo tính tương thích giữa các ứng dụng và phần cứng, đồng thời hỗ trợ việc tái sử dụng mã nguồn và các thành phần phần mềm. Điều này giúp giảm chi phí phát triển và bảo trì phần mềm.
- Giao Tiếp Qua API: Các lớp phần mềm trong AUTOSAR giao tiếp với nhau thông qua các giao diện lập trình ứng dụng (API) được cung cấp bởi BSW. Điều này giúp đảm bảo rằng các lớp phần mềm có thể tương tác hiệu quả mà không cần phải biết chi tiết về các lớp khác.
Kết Luận
Lớp Phần Mềm Cơ Bản (BSW) trong AUTOSAR đóng vai trò quan trọng trong việc quản lý sự phức tạp của các hệ thống điều khiển ô tô hiện đại. BSW cung cấp lớp trừu tượng hóa cho phần cứng, giúp các lớp phần mềm cao hơn hoạt động độc lập với phần cứng cụ thể và đảm bảo tính tương thích và tái sử dụng của phần mềm.
Lớp Dịch Vụ (Service Layer)
Lớp Dịch Vụ (Service Layer) là lớp cao nhất trong phần mềm cơ bản (Basic Software – BSW) của kiến trúc AUTOSAR. Lớp này cung cấp các dịch vụ và chức năng quản lý quan trọng cho các thành phần phần mềm ứng dụng, đồng thời đóng vai trò là cầu nối giữa phần mềm ứng dụng và các lớp dưới của phần mềm cơ bản.
1. Chức Năng Của Lớp Dịch Vụ
- Quản lý tài nguyên hệ thống: Lớp Dịch Vụ quản lý các tài nguyên hệ thống như bộ nhớ, băng thông, và thời gian xử lý. Nó đảm bảo rằng các tài nguyên được phân bổ và sử dụng một cách hiệu quả trong suốt quá trình hoạt động của hệ thống.
- Dịch vụ hệ điều hành: Cung cấp các dịch vụ liên quan đến quản lý tác vụ, bao gồm lập lịch tác vụ, đồng bộ hóa và quản lý ngắt. Điều này giúp điều phối hoạt động của các phần mềm ứng dụng và các thành phần phần mềm cơ sở.
- Dịch vụ chẩn đoán và bảo trì: Cung cấp các dịch vụ chẩn đoán để kiểm tra tình trạng của hệ thống và các thành phần phần mềm, cũng như các dịch vụ bảo trì để hỗ trợ sửa lỗi và nâng cấp hệ thống.
2. Các Thành Phần Chính
- Operating System (OS) Services: Quản lý các tác vụ hệ thống như lập lịch, đồng bộ hóa, và xử lý ngắt. Các dịch vụ này đảm bảo rằng các phần mềm ứng dụng và các thành phần phần mềm khác hoạt động theo đúng kế hoạch và thời gian.
- Diagnostic Services: Cung cấp các dịch vụ để kiểm tra và chẩn đoán lỗi trong hệ thống, bao gồm việc ghi nhận và báo cáo lỗi, kiểm tra trạng thái của hệ thống, và các chức năng chẩn đoán khác.
- Memory Services: Quản lý việc phân bổ và giải phóng bộ nhớ, bao gồm các dịch vụ cho bộ nhớ động và bộ nhớ tĩnh. Điều này giúp đảm bảo rằng các ứng dụng và thành phần phần mềm có đủ bộ nhớ để hoạt động.
- Communication Services: Cung cấp các dịch vụ liên quan đến giao tiếp giữa các thành phần phần mềm và giữa các ECU. Các dịch vụ này bao gồm các giao thức giao tiếp như CAN, FlexRay, và Ethernet.
3. Lợi Ích
- Tăng cường khả năng tương thích: Lớp Dịch Vụ cung cấp các dịch vụ chuẩn giúp các thành phần phần mềm ứng dụng hoạt động một cách đồng nhất và tương thích với các lớp dưới của phần mềm cơ bản.
- Quản lý tài nguyên hiệu quả: Lớp này giúp tối ưu hóa việc quản lý tài nguyên hệ thống, đảm bảo rằng tất cả các phần mềm và thành phần phần mềm hoạt động một cách hiệu quả và không gây xung đột.
- Hỗ trợ bảo trì và nâng cấp: Cung cấp các dịch vụ chẩn đoán và bảo trì giúp phát hiện và sửa lỗi nhanh chóng, đồng thời hỗ trợ nâng cấp và mở rộng hệ thống.
4. Phát Triển và Triển Khai
- Thiết kế dịch vụ: Trong giai đoạn thiết kế, các dịch vụ cần được xác định và cấu hình để đáp ứng yêu cầu của hệ thống và các phần mềm ứng dụng. Điều này bao gồm việc xác định các chức năng và giao diện của các dịch vụ.
- Tích hợp và kiểm thử: Các dịch vụ trong lớp Dịch Vụ cần được tích hợp với các thành phần phần mềm khác và kiểm thử để đảm bảo rằng chúng hoạt động đúng như mong đợi và đáp ứng các yêu cầu của hệ thống.
- Tài liệu và hỗ trợ: Các nhà phát triển cần tài liệu và hỗ trợ để hiểu cách sử dụng và cấu hình các dịch vụ trong lớp Dịch Vụ, cũng như để xử lý các vấn đề phát sinh trong quá trình phát triển và triển khai.
Kết Luận
Lớp Dịch Vụ (Service Layer) là một phần quan trọng của kiến trúc AUTOSAR, cung cấp các dịch vụ quản lý hệ thống, hệ điều hành, chẩn đoán, và giao tiếp cho các phần mềm ứng dụng. Lớp này giúp đảm bảo rằng các thành phần phần mềm hoạt động một cách đồng nhất và hiệu quả, đồng thời hỗ trợ bảo trì và nâng cấp hệ thống. Với vai trò quan trọng trong việc quản lý tài nguyên và hỗ trợ các chức năng hệ thống, lớp Dịch Vụ đóng góp đáng kể vào sự thành công của các ứng dụng ô tô.
Lớp Trừu Tượng Hóa ECU (ECU Abstraction Layer)
Lớp Trừu Tượng Hóa ECU (ECU Abstraction Layer) là một phần quan trọng trong kiến trúc phần mềm AUTOSAR, hoạt động như một lớp trung gian giữa phần mềm ứng dụng và phần cứng ECU (Electronic Control Unit). Lớp này giúp phần mềm ứng dụng hoạt động mà không phụ thuộc vào cách cấu trúc hoặc thiết kế cụ thể của phần cứng ECU, mang lại sự linh hoạt và khả năng mở rộng trong phát triển phần mềm ô tô.
1. Chức Năng Của Lớp Trừu Tượng Hóa ECU
- Cung cấp giao diện đồng nhất: Lớp trừu tượng hóa ECU cung cấp một giao diện chuẩn để tương tác với các thành phần phần cứng của ECU, giúp phần mềm ứng dụng không cần quan tâm đến chi tiết phần cứng cụ thể.
- Cung cấp dịch vụ ECU cụ thể: Nó cung cấp các dịch vụ liên quan đến điều khiển và giao tiếp với phần cứng ECU, bao gồm việc quản lý các tín hiệu I/O và các dịch vụ phần cứng khác.
- Tách biệt phần mềm và phần cứng: Lớp này giúp tách biệt phần mềm ứng dụng khỏi các thay đổi trong phần cứng ECU, làm cho phần mềm dễ dàng bảo trì và nâng cấp.
2. Các Thành Phần Chính
- ECU Driver: Lớp trừu tượng hóa ECU bao gồm các driver ECU, điều khiển việc giao tiếp giữa phần mềm ứng dụng và phần cứng ECU. Các driver này cung cấp chức năng để quản lý các tín hiệu, thiết bị ngoại vi, và các chức năng phần cứng khác.
- Abstraction API: Cung cấp các API để phần mềm ứng dụng có thể yêu cầu và nhận các dịch vụ từ phần cứng ECU mà không cần phải biết chi tiết về cách phần cứng hoạt động.
- Service Layer Interface: Định nghĩa các dịch vụ mà lớp trừu tượng hóa ECU cung cấp cho phần mềm ứng dụng, bao gồm việc quản lý và cấu hình các tín hiệu và dịch vụ phần cứng.
3. Lợi Ích
- Tăng tính di động: Bằng cách cung cấp một lớp trừu tượng giữa phần mềm và phần cứng, lớp trừu tượng hóa ECU giúp phần mềm có thể hoạt động trên các loại ECU khác nhau mà không cần thay đổi mã nguồn.
- Giảm sự phụ thuộc vào phần cứng: Phần mềm ứng dụng có thể hoạt động mà không cần biết chi tiết về phần cứng ECU cụ thể, giúp giảm rủi ro khi thay đổi hoặc nâng cấp phần cứng.
- Cải thiện khả năng bảo trì: Khi phần cứng ECU thay đổi hoặc được nâng cấp, lớp trừu tượng hóa giúp giảm thiểu ảnh hưởng đến phần mềm ứng dụng, làm cho quá trình bảo trì và nâng cấp dễ dàng hơn.
4. Phát Triển và Triển Khai
- Cấu hình ECU: Trong giai đoạn thiết kế, lớp trừu tượng hóa ECU cần được cấu hình để phù hợp với phần cứng cụ thể của ECU. Điều này bao gồm việc thiết lập các thông số và giao diện để đảm bảo rằng các dịch vụ được cung cấp chính xác.
- Tích hợp và kiểm thử: Lớp trừu tượng hóa ECU cần được tích hợp với các thành phần phần mềm khác và kiểm thử để đảm bảo rằng nó hoạt động đúng như mong đợi và cung cấp các dịch vụ chính xác cho phần mềm ứng dụng.
- Tài liệu và hỗ trợ: Các nhà phát triển và kỹ sư phần mềm cần tài liệu và hỗ trợ để hiểu cách sử dụng lớp trừu tượng hóa ECU và cấu hình nó cho các ứng dụng cụ thể.
Kết Luận
Lớp Trừu Tượng Hóa ECU (ECU Abstraction Layer) là một thành phần quan trọng trong kiến trúc AUTOSAR, giúp tạo ra một giao diện đồng nhất giữa phần mềm ứng dụng và phần cứng ECU. Nó cung cấp khả năng linh hoạt và giảm thiểu sự phụ thuộc vào phần cứng cụ thể, làm cho phần mềm ô tô dễ dàng bảo trì, nâng cấp và mở rộng. Lớp trừu tượng hóa ECU giúp đảm bảo rằng các thành phần phần mềm có thể hoạt động hiệu quả trong các hệ thống ô tô đa dạng và phức tạp.
Lớp Trừu Tượng Hóa Vi Điều Khiển (Microcontroller Abstraction Layer – MCAL)

Lớp Trừu Tượng Hóa Vi Điều Khiển là lớp thấp nhất trong Phần mềm cơ bản (Basic Software – BSW) trong kiến trúc AUTOSAR. Lớp này đóng vai trò như cầu nối giữa phần mềm ứng dụng và phần cứng vi điều khiển, giúp phần mềm cấp cao hơn hoạt động mà không phải quan tâm đến các chi tiết phức tạp của phần cứng vi điều khiển cụ thể.
1. Chức Năng Của Lớp Trừu Tượng Hóa Vi Điều Khiển
- Đơn giản hóa giao tiếp với phần cứng: Lớp MCAL cung cấp một tập hợp các thư viện và hàm API chuẩn để giao tiếp với phần cứng vi điều khiển, như điều khiển các driver, GPIO (General Purpose Input/Output), các chức năng I/O, và A/D (Analog-to-Digital).
- Ẩn chi tiết phần cứng: Lớp này giấu các chi tiết phức tạp liên quan đến phần cứng vi điều khiển, giúp phần mềm ứng dụng không cần phải biết về cấu hình hoặc các phương pháp cụ thể của vi điều khiển.
- Cung cấp tính di động: Bằng cách sử dụng lớp trừu tượng hóa, phần mềm ứng dụng có thể hoạt động trên các vi điều khiển khác nhau mà không cần thay đổi mã nguồn, miễn là lớp MCAL cho các vi điều khiển đó tuân thủ các tiêu chuẩn AUTOSAR.
2. Các Thành Phần Chính
- Driver Vi Điều Khiển: Lớp MCAL bao gồm các driver để điều khiển các chức năng cơ bản của vi điều khiển như GPIO, ADC (Analog-to-Digital Converter), và các bộ điều khiển thời gian thực.
- Thư Viện và Hàm API: Các thư viện và hàm API do MCAL cung cấp cho phép các phần mềm ứng dụng thực hiện các tác vụ như đọc và ghi dữ liệu, cấu hình ngắt, và điều khiển các thiết bị ngoại vi mà không cần phải hiểu chi tiết về phần cứng.
Lớp Trừu Tượng Hóa Vi Điều Khiển bao gồm các nhóm mô-đun sau:
Driver Vi Điều Khiển:
- Chức năng: Driver cho các thiết bị ngoại vi nội bộ (ví dụ: Watchdog, Bộ đếm mục đích chung)
- Chức năng với truy cập trực tiếp vào μC: Ví dụ như kiểm tra lõi
Driver Giao Tiếp:
- Chức năng: Driver cho giao tiếp ECU (ví dụ: SPI) và giao tiếp xe (ví dụ: CAN)
- OSI-Layer: Phần của lớp liên kết dữ liệu (Data Link Layer)
Driver Bộ Nhớ:
- Chức năng: Driver cho các thiết bị bộ nhớ trên chip (ví dụ: Flash nội bộ, EEPROM nội bộ) và các thiết bị bộ nhớ ngoại vi ánh xạ vào bộ nhớ (ví dụ: Flash ngoại vi)
Driver I/O:
- Chức năng: Driver cho I/O analog và kỹ thuật số (ví dụ: ADC, PWM, DIO)
Driver Crypto:
- Chức năng: Driver cho các thiết bị mã hóa trên chip như SHE hoặc HSM
Driver Giao Tiếp Không Dây:
- Chức năng: Driver cho hệ thống mạng không dây (giao tiếp trên xe hoặc ngoài xe)
3. Lợi Ích
- Tăng hiệu quả phát triển: Bằng cách cung cấp một giao diện chuẩn để làm việc với phần cứng, MCAL giúp giảm thời gian phát triển và công sức cần thiết để tích hợp phần mềm với vi điều khiển.
- Giảm sự phụ thuộc vào phần cứng: Phần mềm ứng dụng không cần phải biết chi tiết về vi điều khiển cụ thể, giúp việc chuyển đổi giữa các vi điều khiển khác nhau trở nên dễ dàng hơn.
- Tiết kiệm thời gian và công sức: Thay vì phát triển và bảo trì mã nguồn để tương thích với nhiều loại vi điều khiển khác nhau, các nhà phát triển chỉ cần làm việc với lớp MCAL, tiết kiệm đáng kể thời gian và công sức.
4. Phát Triển và Triển Khai
- Tiêu chuẩn hóa: Lớp MCAL tuân thủ các tiêu chuẩn và quy định của AUTOSAR, giúp đảm bảo tính tương thích và khả năng tái sử dụng của các thành phần phần mềm.
- Cung cấp bởi nhà sản xuất vi điều khiển: Các nhà sản xuất vi điều khiển thường cung cấp các thư viện MCAL chuẩn cho các sản phẩm của họ. Việc sử dụng các thư viện này thay vì phát triển riêng giúp tiết kiệm thời gian và giảm rủi ro.
- Cập nhật và bảo trì: Các thư viện và hàm API của MCAL cần được cập nhật và bảo trì để hỗ trợ các phiên bản mới của vi điều khiển hoặc các yêu cầu mới từ các ứng dụng phần mềm.
Kết luận
Lớp Trừu Tượng Hóa Vi Điều Khiển (MCAL) là một thành phần quan trọng trong kiến trúc AUTOSAR, giúp giảm thiểu sự phụ thuộc vào phần cứng cụ thể và đơn giản hóa quá trình phát triển phần mềm. Bằng cách cung cấp một giao diện chuẩn để tương tác với phần cứng vi điều khiển, MCAL giúp tăng hiệu quả phát triển, giảm chi phí, và cải thiện tính linh hoạt của các hệ thống phần mềm ô tô.
Driver Thiết Bị Phức Tạp (Complex Device Driver – CDD)
Driver Thiết Bị Phức Tạp (Complex Device Driver – CDD) là một thành phần quan trọng trong phần mềm cơ bản (Basic Software – BSW) của kiến trúc AUTOSAR. CDD hoạt động như một trung tâm chuẩn hóa, đặc biệt là khi cần tương tác với các thiết bị phần cứng phức tạp hoặc các thiết bị không được hỗ trợ trực tiếp bởi các driver cơ bản.
1. Chức Năng Của CDD
- Tích hợp thiết bị phức tạp: CDD được thiết kế để tích hợp và quản lý các thiết bị phần cứng phức tạp mà không thể được quản lý bằng các driver cơ bản trong lớp trừu tượng hóa ECU (ECU Abstraction Layer).
- Chuẩn hóa và quản lý mã: CDD đóng vai trò trong việc chuẩn hóa mã nguồn và cung cấp một cách tiếp cận đồng nhất cho việc quản lý và sử dụng mã, bao gồm cả mã cũ và mã mới.
- Sử dụng lớp bọc (wrapper): Sử dụng lớp bọc để tái sử dụng mã nguồn và tích hợp các chức năng phức tạp, giúp giảm thiểu sự cần thiết phải viết mã mới và tối ưu hóa việc sử dụng mã đã có.
2. Các Thành Phần Chính
- Driver Phức Tạp: CDD bao gồm các driver phức tạp, thường được sử dụng để điều khiển các thiết bị phần cứng mà không thể được quản lý trực tiếp bởi lớp trừu tượng hóa ECU. Các driver này có thể bao gồm các giao diện phần cứng hoặc các chức năng phần mềm phức tạp.
- Lớp Bọc (Wrapper): Lớp bọc là một lớp mã nguồn được sử dụng để bao bọc và chuẩn hóa các driver phức tạp, giúp tái sử dụng mã và giảm thiểu sự cần thiết phải viết mã mới.
- API Chuẩn: Cung cấp các API chuẩn để phần mềm ứng dụng có thể tương tác với các driver phức tạp mà không cần phải biết chi tiết về cách các thiết bị được quản lý hoặc cấu hình.
3. Lợi Ích
- Chuẩn hóa mã nguồn: CDD giúp chuẩn hóa mã nguồn và quản lý các driver phức tạp, giúp dễ dàng bảo trì và nâng cấp hệ thống.
- Tái sử dụng mã: Việc sử dụng lớp bọc giúp tái sử dụng mã cũ, giảm thiểu sự cần thiết phải phát triển mã mới và tăng hiệu quả phát triển.
- Giảm phức tạp: CDD giúp giảm thiểu sự phức tạp trong việc tích hợp các thiết bị phần cứng phức tạp, làm cho hệ thống phần mềm dễ dàng hơn để phát triển và bảo trì.
4. Phát Triển và Triển Khai
- Thiết kế driver phức tạp: Trong giai đoạn thiết kế, cần xác định các yêu cầu của các driver phức tạp và cấu hình chúng để đáp ứng các yêu cầu của hệ thống. Điều này bao gồm việc xác định các chức năng và giao diện của các driver.
- Tích hợp lớp bọc: Các lớp bọc cần được phát triển và tích hợp để chuẩn hóa mã nguồn và đảm bảo tính tương thích với các driver phức tạp.
- Kiểm thử và bảo trì: CDD cần được kiểm thử để đảm bảo rằng nó hoạt động đúng như mong đợi và đáp ứng các yêu cầu của hệ thống. Cần duy trì và cập nhật các driver phức tạp và lớp bọc để hỗ trợ các thay đổi trong hệ thống hoặc phần cứng.
Kết Luận
Driver Thiết Bị Phức Tạp (Complex Device Driver – CDD) là một thành phần quan trọng trong kiến trúc AUTOSAR, cung cấp một cách tiếp cận chuẩn hóa để quản lý và tích hợp các thiết bị phần cứng phức tạp. Bằng cách sử dụng lớp bọc và chuẩn hóa mã nguồn, CDD giúp giảm thiểu sự phức tạp trong việc phát triển và bảo trì hệ thống phần mềm, đồng thời tối ưu hóa việc tái sử dụng mã. CDD đóng vai trò quan trọng trong việc đảm bảo rằng các thiết bị phần cứng phức tạp có thể được tích hợp và quản lý hiệu quả trong các hệ thống ô tô.
Lớp Môi Trường Thực Thi (Runtime Environment – RTE)

Lớp Môi Trường Thực Thi (Runtime Environment – RTE) là một thành phần quan trọng trong kiến trúc AUTOSAR, hoạt động như cầu nối giữa phần mềm ứng dụng và các lớp cơ bản của phần mềm cơ bản (Basic Software – BSW). Lớp RTE đóng vai trò trung gian, giúp các thành phần phần mềm ứng dụng tương tác với các dịch vụ của phần mềm cơ sở mà không cần biết chi tiết về cách thức hoạt động của phần mềm cơ sở đó.
1. Chức Năng Của RTE
- Cung cấp giao diện phần mềm đồng nhất: RTE cung cấp một giao diện đồng nhất cho các phần mềm ứng dụng, giúp các thành phần phần mềm ứng dụng có thể giao tiếp với các dịch vụ của phần mềm cơ sở một cách dễ dàng mà không cần quan tâm đến chi tiết kỹ thuật của lớp BSW.
- Quản lý giao tiếp giữa các thành phần phần mềm: RTE quản lý việc giao tiếp giữa các phần mềm ứng dụng và giữa các phần mềm ứng dụng với các dịch vụ của phần mềm cơ sở. Điều này bao gồm việc truyền thông điệp, dữ liệu và các tín hiệu giữa các thành phần.
- Hỗ trợ cấu hình và tạo mã tự động: RTE thường được cấu hình và tạo mã tự động từ các công cụ phát triển AUTOSAR, giúp giảm thiểu công sức phát triển và tối ưu hóa quá trình tích hợp.
2. Các Thành Phần Chính
- Giao diện RTE: Cung cấp các API và giao diện để các phần mềm ứng dụng có thể yêu cầu và nhận các dịch vụ từ các lớp dưới của phần mềm cơ sở. Các giao diện này giúp đơn giản hóa việc tích hợp các phần mềm ứng dụng và các dịch vụ cơ sở.
- Module Communication: Quản lý các giao tiếp giữa các phần mềm ứng dụng và giữa các phần mềm ứng dụng với các dịch vụ phần mềm cơ sở. Điều này bao gồm việc xử lý các thông điệp và dữ liệu, đảm bảo chúng được truyền tải đúng cách và hiệu quả.
- Code Generation: RTE thường sử dụng các công cụ tạo mã tự động để sinh mã cần thiết cho giao tiếp giữa các phần mềm ứng dụng và phần mềm cơ sở. Điều này giúp giảm thiểu công việc phát triển và tăng cường tính chính xác trong việc tạo mã.
3. Lợi Ích
- Tăng cường khả năng tương thích: RTE cung cấp một giao diện đồng nhất giúp các phần mềm ứng dụng hoạt động một cách đồng bộ và tương thích với các lớp phần mềm cơ sở, bất kể sự thay đổi trong phần mềm cơ sở.
- Giảm phức tạp phát triển: Bằng cách quản lý giao tiếp và cung cấp các API chuẩn, RTE giúp giảm thiểu sự phức tạp trong việc phát triển và tích hợp các phần mềm ứng dụng.
- Tối ưu hóa hiệu quả phát triển: Việc sử dụng các công cụ tạo mã tự động giúp tối ưu hóa quá trình phát triển và đảm bảo rằng mã được sinh ra chính xác và hiệu quả.
4. Phát Triển và Triển Khai
- Cấu hình RTE: Trong giai đoạn thiết kế, cần cấu hình RTE để phù hợp với yêu cầu của hệ thống và các phần mềm ứng dụng. Điều này bao gồm việc thiết lập các giao diện và API cần thiết cho giao tiếp giữa các phần mềm ứng dụng và phần mềm cơ sở.
- Tạo mã tự động: Sử dụng các công cụ tạo mã tự động để sinh mã cần thiết cho RTE, giúp giảm thiểu công việc phát triển và tối ưu hóa quá trình tích hợp.
- Kiểm thử và bảo trì: RTE cần được kiểm thử để đảm bảo rằng nó hoạt động đúng như mong đợi và đáp ứng các yêu cầu của hệ thống. Cần duy trì và cập nhật RTE để hỗ trợ các thay đổi trong hệ thống hoặc phần mềm ứng dụng.
Kết Luận
Lớp Môi Trường Thực Thi (Runtime Environment – RTE) là một phần quan trọng trong kiến trúc AUTOSAR, đóng vai trò là cầu nối giữa phần mềm ứng dụng và phần mềm cơ sở. RTE cung cấp giao diện đồng nhất cho các phần mềm ứng dụng, giúp quản lý giao tiếp và truyền dữ liệu một cách hiệu quả. Với khả năng giảm thiểu sự phức tạp trong phát triển và tích hợp, cũng như hỗ trợ cấu hình và tạo mã tự động, RTE giúp tối ưu hóa quá trình phát triển phần mềm ô tô và nâng cao hiệu quả của hệ thống.
Lớp Ứng Dụng (Application Layer)
Lớp Ứng Dụng (Application Layer) là lớp cao nhất trong kiến trúc AUTOSAR và là nơi chứa các phần mềm ứng dụng cụ thể của hệ thống. Đây là nơi mà các chức năng và logic của ứng dụng được triển khai, và lớp này chịu trách nhiệm thực hiện các nhiệm vụ cụ thể của hệ thống ô tô.
1. Chức Năng Của Lớp Ứng Dụng
- Xây dựng và triển khai chức năng ứng dụng: Lớp Ứng Dụng là nơi phát triển các chức năng và logic của ứng dụng, bao gồm việc thực hiện các nhiệm vụ cụ thể như điều khiển động cơ, hệ thống điều hòa, hoặc các hệ thống an toàn.
- Tương tác với các lớp dưới: Thông qua lớp Môi Trường Thực Thi (RTE), các phần mềm ứng dụng trong lớp này tương tác với các dịch vụ và thành phần phần mềm cơ sở. Điều này cho phép các phần mềm ứng dụng yêu cầu và nhận các dịch vụ từ lớp BSW.
- Tạo mã ứng dụng: Các phần mềm ứng dụng có thể được viết bằng các ngôn ngữ lập trình như C, C++, hoặc các ngôn ngữ lập trình khác, tùy thuộc vào yêu cầu và công cụ phát triển.
2. Các Thành Phần Chính
- Software Components (SWCs): Các thành phần phần mềm ứng dụng (SWCs) là các đơn vị chức năng cơ bản trong lớp ứng dụng. Mỗi SWC thực hiện một nhiệm vụ cụ thể và có thể giao tiếp với các SWCs khác thông qua lớp RTE. Các SWCs có thể bao gồm các chức năng như điều khiển động cơ, xử lý dữ liệu cảm biến, và giao tiếp với các hệ thống khác.
- Application Logic: Đây là mã và logic cụ thể của ứng dụng được triển khai trong lớp này. Nó thực hiện các nhiệm vụ cần thiết cho hệ thống và tương tác với các dịch vụ phần mềm cơ sở thông qua lớp RTE.
- Configuration and Parameterization: Các phần mềm ứng dụng cần được cấu hình và tham số hóa để hoạt động chính xác trong hệ thống. Điều này bao gồm việc thiết lập các thông số và cấu hình các SWCs để phù hợp với yêu cầu của hệ thống.
3. Lợi Ích
- Tạo ra ứng dụng chuyên biệt: Lớp Ứng Dụng cho phép phát triển các ứng dụng cụ thể cho hệ thống ô tô, giúp thực hiện các chức năng chuyên biệt như điều khiển động cơ, quản lý hệ thống an toàn, và điều khiển các hệ thống giải trí.
- Tách biệt logic ứng dụng và phần mềm cơ sở: Bằng cách tách biệt logic ứng dụng khỏi phần mềm cơ sở, lớp Ứng Dụng giúp đơn giản hóa việc phát triển và bảo trì ứng dụng, đồng thời tạo điều kiện cho việc tái sử dụng và mở rộng ứng dụng.
- Tương thích với các lớp dưới: Lớp Ứng Dụng tương thích với các lớp phần mềm cơ sở thông qua lớp RTE, giúp đảm bảo rằng các phần mềm ứng dụng hoạt động hiệu quả và chính xác trong hệ thống.
4. Phát Triển và Triển Khai
- Thiết kế phần mềm ứng dụng: Trong giai đoạn thiết kế, cần xác định các chức năng và yêu cầu của phần mềm ứng dụng, đồng thời thiết kế các SWCs để thực hiện các nhiệm vụ cụ thể.
- Lập trình và kiểm thử: Phát triển mã nguồn cho các SWCs và thực hiện kiểm thử để đảm bảo rằng phần mềm ứng dụng hoạt động đúng như mong đợi và đáp ứng các yêu cầu của hệ thống.
- Tích hợp và triển khai: Tích hợp các phần mềm ứng dụng vào hệ thống tổng thể và triển khai ứng dụng để đảm bảo rằng nó hoạt động hiệu quả trong môi trường ô tô.
Kết Luận
Lớp Ứng Dụng (Application Layer) là lớp cao nhất trong kiến trúc AUTOSAR, nơi các phần mềm ứng dụng cụ thể được phát triển và triển khai. Lớp này thực hiện các chức năng và logic của ứng dụng, đồng thời tương tác với các dịch vụ của phần mềm cơ sở thông qua lớp Môi Trường Thực Thi (RTE). Bằng cách tách biệt logic ứng dụng khỏi phần mềm cơ sở và cung cấp khả năng tạo ra các ứng dụng chuyên biệt, lớp Ứng Dụng đóng vai trò quan trọng trong việc phát triển và triển khai các hệ thống ô tô hiện đại.
5. Use Case: Giao Tiếp từ Ứng Dụng xuống Vi Điều Khiển
Để dễ hình dung về cách phần mềm tương tác từ lớp ứng dụng xuống vi điều khiển trong hệ thống AUTOSAR, hãy xem xét một ví dụ đơn giản:
Use Case: Điều Khiển Đèn LED

Mô tả: Chúng ta có một ứng dụng đơn giản trong hệ thống ô tô cần điều khiển một đèn LED. Mục tiêu là bật và tắt đèn LED dựa trên các lệnh từ phần mềm ứng dụng.
Các Thành Phần:
- Ứng dụng (Application Layer): Phần mềm ứng dụng chứa mã điều khiển logic cho việc bật và tắt đèn LED.
- Lớp Trừu tượng ECU (EAL): Cung cấp các API để giao tiếp với phần cứng mà không cần biết chi tiết cụ thể về phần cứng.
- Lớp Trừu tượng Vi Điều Khiển (MCAL): Xử lý các giao tiếp cụ thể với phần cứng vi điều khiển.
- Phần cứng (Microcontroller): Bao gồm các thanh ghi và cổng để điều khiển đèn LED.
Quá Trình:
- Ứng Dụng Yêu Cầu: Ứng dụng gửi lệnh điều khiển để bật hoặc tắt đèn LED (ví dụ, thông qua một hàm
setLEDState(state)). - Gọi API từ EAL: Lệnh từ ứng dụng được truyền xuống lớp trừu tượng ECU (EAL). EAL cung cấp một API chuẩn (ví dụ,
LED_Control_API) để xử lý lệnh này mà không cần ứng dụng phải biết chi tiết về phần cứng. - Truyền Tới MCAL: API từ EAL gọi đến lớp trừu tượng vi điều khiển (MCAL). MCAL sử dụng các trình điều khiển để tương tác với các thanh ghi và cổng phần cứng cụ thể trên vi điều khiển.
- Giao Tiếp với Phần Cứng: MCAL truyền lệnh đến phần cứng, nơi các thanh ghi và cổng được cấu hình để bật hoặc tắt đèn LED.
- Phản Hồi: Đèn LED bật hoặc tắt theo yêu cầu từ ứng dụng. Nếu cần, phần cứng có thể gửi phản hồi lại qua các cơ chế như ngắt hoặc trạng thái.
Lợi Ích của Trừu Tượng:
- Ẩn Chi Tiết Phần Cứng: Ứng dụng không cần phải biết chi tiết về cách phần cứng điều khiển đèn LED, chỉ cần sử dụng API chuẩn.
- Tái Sử Dụng và Tính Tương Thích: Mã ứng dụng có thể dễ dàng chuyển sang các nền tảng phần cứng khác mà không cần thay đổi, miễn là các API chuẩn được duy trì.
- Quản Lý Phức Tạp: Các lớp trừu tượng giúp quản lý phức tạp của phần cứng, cho phép các nhà phát triển tập trung vào logic ứng dụng mà không lo về chi tiết kỹ thuật thấp hơn.
Qua ví dụ này, bạn có thể thấy rõ cách mà các lớp trừu tượng trong AUTOSAR giúp giảm bớt sự phức tạp và làm cho phần mềm trở nên dễ quản lý hơn.
Use Case: Hệ Thống Cảnh Báo Va Chạm (ADAS)
Để làm rõ cách phần mềm trong hệ thống AUTOSAR tương tác với vi điều khiển trong một ứng dụng Advanced Driver Assistance System (ADAS), hãy xem xét một ví dụ cụ thể:
Use Case: Hệ Thống Cảnh Báo Va Chạm

Mô tả: Hệ thống cảnh báo va chạm là một phần của ADAS giúp phát hiện nguy cơ va chạm và cảnh báo người lái xe để tránh tai nạn. Hệ thống này sử dụng cảm biến và camera để thu thập dữ liệu, sau đó xử lý và đưa ra cảnh báo.
Các Thành Phần:
- Ứng dụng (Application Layer): Phần mềm ứng dụng điều khiển cảnh báo va chạm, phân tích dữ liệu từ cảm biến và đưa ra cảnh báo cho người lái.
- Lớp Trừu tượng ECU (EAL): Cung cấp API để ứng dụng giao tiếp với phần cứng mà không cần biết chi tiết phần cứng.
- Lớp Trừu tượng Vi Điều Khiển (MCAL): Quản lý giao tiếp với các cảm biến và thiết bị đầu vào, xử lý các tín hiệu từ cảm biến.
- Phần cứng (Microcontroller và Cảm Biến): Bao gồm các cảm biến và vi điều khiển để thu thập và xử lý dữ liệu.
Quá Trình:
- Thu Thập Dữ Liệu: Các cảm biến và camera gắn trên xe thu thập dữ liệu về môi trường xung quanh, chẳng hạn như khoảng cách đến xe phía trước và các vật cản.
- Gửi Dữ Liệu đến MCAL: Dữ liệu từ cảm biến được gửi đến lớp trừu tượng vi điều khiển (MCAL). MCAL xử lý các tín hiệu từ cảm biến và chuẩn bị dữ liệu để truyền lên lớp trên.
- Giao Tiếp qua EAL: MCAL gửi dữ liệu đã xử lý lên lớp trừu tượng ECU (EAL). EAL cung cấp các API chuẩn cho phép lớp ứng dụng truy cập dữ liệu mà không cần biết chi tiết phần cứng.
- Xử Lý tại Ứng Dụng: Phần mềm ứng dụng nhận dữ liệu từ EAL và phân tích để phát hiện nguy cơ va chạm. Ứng dụng áp dụng các thuật toán để đánh giá tình trạng giao thông và xác định nguy cơ va chạm.
- Cảnh Báo Người Lái: Nếu hệ thống phát hiện nguy cơ va chạm, ứng dụng gửi lệnh đến các hệ thống cảnh báo như còi, đèn nhấp nháy, hoặc màn hình hiển thị để cảnh báo người lái xe.
- Phản Hồi: Hệ thống phản hồi ngay lập tức để cảnh báo người lái xe và có thể kích hoạt các biện pháp an toàn khác như phanh tự động nếu cần.
Lợi Ích của Trừu Tượng:
- Giấu Chi Tiết Phần Cứng: Lớp ứng dụng không cần biết chi tiết về cách các cảm biến và vi điều khiển hoạt động, chỉ cần sử dụng API để nhận và xử lý dữ liệu.
- Tính Tương Thích Cao: Phần mềm cảnh báo va chạm có thể dễ dàng chuyển sang các nền tảng phần cứng khác mà không cần thay đổi, miễn là API và giao thức được duy trì.
- Quản Lý Dữ Liệu Phức Tạp: Các lớp trừu tượng giúp quản lý việc thu thập và xử lý dữ liệu phức tạp từ nhiều cảm biến, giúp phần mềm ứng dụng tập trung vào việc phân tích và cảnh báo.
Qua ví dụ này, bạn có thể thấy cách các lớp trừu tượng trong AUTOSAR hỗ trợ việc phát triển và triển khai các ứng dụng ADAS phức tạp, đồng thời làm cho phần mềm dễ quản lý và mở rộng hơn.
6. Các Thành phần Phần mềm trong AUTOSAR (Software Components – SWCs)

AUTOSAR (Automotive Open System Architecture) sử dụng một cách tiếp cận mô-đun hóa và phân lớp cho phát triển phần mềm ô tô. Trong hệ thống này, các Thành phần Phần mềm (Software Components – SWCs) đóng vai trò cốt lõi. Dưới đây là tổng quan chi tiết về các thành phần phần mềm trong AUTOSAR.
1. Khái niệm về Thành phần Phần mềm (SWCs)
Hãy tưởng tượng một chiếc ô tô như một hệ thống phức tạp gồm rất nhiều bộ phận nhỏ làm việc cùng nhau. Mỗi bộ phận này, trong thế giới phần mềm của ô tô, được gọi là một SWC. SWC là đơn vị nhỏ nhất, độc lập và có thể tái sử dụng trong kiến trúc phần mềm AUTOSAR. Nó đóng vai trò như một “gạch” để xây dựng nên toàn bộ hệ thống điều khiển của xe.
2. Các thành phần cơ bản của một SWC
Mỗi SWC bao gồm các thành phần sau:
- Port: Đây là các cổng giao tiếp để SWC tương tác với các SWC khác hoặc với các phần cứng bên ngoài. Có 2 loại port chính:
- Sender Port: Dùng để gửi dữ liệu đi.
- Receiver Port: Dùng để nhận dữ liệu về.
- Runnable: Đây là các đoạn mã thực thi bên trong SWC. Chúng chứa các thuật toán và logic xử lý dữ liệu.
- Internal Behavior: Mô tả cách các runnable tương tác với nhau bên trong SWC, cũng như cách chúng xử lý các sự kiện.
- Data Elements: Đây là các biến và hằng số được sử dụng trong SWC để lưu trữ dữ liệu.
Để hiểu rõ hơn về khái niệm Giao diện SR (Sender-Receiver Interface) và Giao diện CS (Client-Server Interface), hãy xem ví dụ dưới đây:

Chúng ta có hai cảm biến (sensor) để theo dõi chuyển động của cửa, một cho cửa phải và một cho cửa trái, được gọi là Cảm biến Cửa Phải và Cảm biến Cửa Trái. Cảm biến Cửa Phải đóng vai trò là cổng gửi (Sender Port, viết tắt là P-Port), nó sẽ ghi lại trạng thái cửa (mở hay đóng). Cảm biến Cửa Trái sẽ nhận (Receiver Port, viết tắt là R-Port) thông tin về trạng thái cửa và đọc trạng thái của cửa.
SWC (Software Component) của Cảm biến Cửa Phải và SWC của Cảm biến Cửa Trái đóng vai trò là các cổng phục vụ (Server Port, cũng là P-Port). Nó sẽ nhận đầu vào từ các bộ kích hoạt (actuator), sau đó cung cấp thông tin về trạng thái cửa. SWC của Đèn Nội Thất sẽ đóng vai trò là cổng khách hàng (Client Port, viết tắt là R-Port) và sẽ nhận trạng thái đèn nội thất, để xác định xem đèn đang bật hay tắt dựa trên trạng thái của cửa.
Bằng cách này, Giao diện SR dùng để truyền tải thông tin từ một nguồn (sender) đến một đích (receiver), còn Giao diện CS dùng để tương tác giữa một dịch vụ (service) và khách hàng (client) của dịch vụ đó.
3. Thành phần Phần mềm Ứng dụng (Application SWCs)
Giới thiệu
Application SWCs là những “gạch xây” chính trong việc tạo nên các chức năng mà người dùng trực tiếp tương tác với chiếc xe. Chúng là các module phần mềm thực hiện các nhiệm vụ cấp cao, quyết định hành vi của xe, từ việc điều khiển động cơ, hệ thống phanh, đến quản lý các tiện nghi như điều hòa, hệ thống giải trí.
Vai trò và Chức năng
- Cấp cao nhất trong kiến trúc AUTOSAR: Application SWCs nằm ở tầng cao nhất của kiến trúc AUTOSAR, trực tiếp tương tác với người dùng thông qua các giao diện điều khiển.
- Thực hiện các chức năng cốt lõi: Chúng chịu trách nhiệm thực hiện các thuật toán phức tạp để điều khiển các hệ thống của xe, đảm bảo an toàn và hiệu suất hoạt động.
- Tương tác với các SWC khác: Application SWCs giao tiếp với các SWC ở các tầng thấp hơn (như SWC cảm biến, SWC điều khiển) thông qua các port để thu thập dữ liệu và ra lệnh điều khiển.
Ví dụ về Application SWCs
- SWC điều khiển động cơ: Điều chỉnh tốc độ động cơ, mô-men xoắn dựa trên tín hiệu từ chân ga, cảm biến tốc độ, và các yếu tố khác.
- SWC hệ thống phanh: Quản lý lực phanh, phân phối lực phanh giữa các bánh xe, và các chức năng hỗ trợ phanh như ABS, ESP.
- SWC điều hòa không khí: Điều chỉnh nhiệt độ, hướng gió, và các thông số khác của hệ thống điều hòa.
- SWC hệ thống thông tin giải trí: Quản lý các chức năng như radio, CD, GPS, kết nối Bluetooth, và màn hình hiển thị.
Đặc điểm nổi bật
- Độ phức tạp cao: Application SWCs thường chứa các thuật toán phức tạp, đòi hỏi kiến thức sâu về các hệ thống cơ khí, điện tử và điều khiển.
- Tương tác với người dùng: Chúng trực tiếp cung cấp các chức năng mà người lái và hành khách tương tác, vì vậy giao diện người dùng phải được thiết kế thân thiện và dễ sử dụng.
- An toàn: Các Application SWCs liên quan đến an toàn của xe, do đó chúng phải được thiết kế và kiểm thử kỹ lưỡng để đảm bảo hoạt động ổn định và đáng tin cậy.
Cấu trúc và Thành phần
Giống như các SWCs khác, Application SWCs cũng bao gồm các thành phần chính:
- Ports: Để giao tiếp với các SWCs khác và các thiết bị ngoại vi.
- Runnables: Chứa các đoạn mã thực thi để thực hiện các chức năng cụ thể.
- Data Elements: Lưu trữ các dữ liệu cần thiết cho quá trình tính toán và điều khiển.
- Internal Behavior: Mô tả cách các runnable tương tác với nhau bên trong SWC.
Lợi ích của việc sử dụng Application SWCs
- Tính mô đun hóa: Giúp dễ dàng phát triển, bảo trì và nâng cấp phần mềm.
- Tái sử dụng: Các Application SWCs có thể được sử dụng lại trong các dự án khác nhau.
- Khả năng mở rộng: Hệ thống có thể dễ dàng mở rộng bằng cách thêm hoặc loại bỏ các Application SWCs.
- Khả năng tương thích: Tuân thủ tiêu chuẩn AUTOSAR, đảm bảo khả năng tương tác với các SWCs khác.
Kết luận
Application SWCs là một phần không thể thiếu trong kiến trúc AUTOSAR. Chúng đóng vai trò quan trọng trong việc định hình hành vi và chức năng của một chiếc xe. Hiểu rõ về Application SWCs sẽ giúp bạn có cái nhìn tổng quan về cách thức hoạt động của phần mềm điều khiển ô tô.
4. Thành phần Phần mềm Cơ sở (Basic SWCs)
Giới thiệu
Basic SWCs là những “viên gạch” cơ bản nhất trong kiến trúc phần mềm AUTOSAR. Chúng cung cấp các chức năng đơn giản, không quá phức tạp, và thường được sử dụng để thực hiện các tác vụ nền tảng.
Vai trò và Chức năng
- Cung cấp các dịch vụ cơ bản: Basic SWCs cung cấp các dịch vụ cơ bản như xử lý ngắt, quản lý bộ nhớ, giao tiếp với các thiết bị ngoại vi đơn giản.
- Hỗ trợ các SWCs cấp cao: Chúng cung cấp nền tảng để các SWCs cấp cao hơn như Application SWCs hoạt động một cách hiệu quả.
- Thực hiện các tác vụ đơn giản: Basic SWCs thường thực hiện các tác vụ đơn giản, lặp đi lặp lại, chẳng hạn như đọc/ghi dữ liệu từ/vào các cảm biến, bộ nhớ.
Ví dụ về Basic SWCs
- SWC xử lý ngắt: Quản lý các ngắt từ các thiết bị ngoại vi, đảm bảo các sự kiện được xử lý kịp thời.
- SWC quản lý bộ nhớ: Phân bổ và giải phóng bộ nhớ cho các SWCs khác.
- SWC giao tiếp với các thiết bị ngoại vi đơn giản: Đọc/ghi dữ liệu từ/vào các cảm biến đơn giản như cảm biến nhiệt độ, cảm biến áp suất.
Đặc điểm nổi bật
- Độ phức tạp thấp: Basic SWCs thường có cấu trúc đơn giản, dễ hiểu và triển khai.
- Tính chung: Chúng có thể được sử dụng trong nhiều loại ứng dụng khác nhau.
- Hiệu suất cao: Basic SWCs thường được tối ưu hóa để hoạt động hiệu quả.
Cấu trúc và Thành phần
Giống như các SWCs khác, Basic SWCs cũng bao gồm các thành phần chính:
- Ports: Để giao tiếp với các SWCs khác và các thiết bị ngoại vi.
- Runnables: Chứa các đoạn mã thực thi để thực hiện các chức năng cụ thể.
- Data Elements: Lưu trữ các dữ liệu cần thiết cho quá trình tính toán và điều khiển.
- Internal Behavior: Mô tả cách các runnable tương tác với nhau bên trong SWC.
Lợi ích của việc sử dụng Basic SWCs
- Tính mô đun hóa: Giúp dễ dàng phát triển, bảo trì và nâng cấp phần mềm.
- Tái sử dụng: Các Basic SWCs có thể được sử dụng lại trong các dự án khác nhau.
- Hiệu suất: Đảm bảo hệ thống hoạt động ổn định và hiệu quả.
Kết luận
Basic SWCs là nền tảng quan trọng cho việc xây dựng các hệ thống phần mềm phức tạp trong AUTOSAR. Chúng cung cấp các dịch vụ cơ bản cần thiết để các SWCs cấp cao hơn hoạt động. Hiểu rõ về Basic SWCs sẽ giúp bạn có cái nhìn toàn diện hơn về kiến trúc AUTOSAR.
5. Thành Phần Phần Mềm Dịch Vụ (Service SWCs)
Giới thiệu
Service SWCs là một loại thành phần phần mềm đặc biệt trong kiến trúc AUTOSAR, cung cấp các dịch vụ chung cho các SWCs khác. Chúng không trực tiếp liên quan đến việc điều khiển các chức năng của xe, mà tập trung vào việc hỗ trợ các hoạt động của hệ thống.
Vai trò và Chức năng
- Cung cấp dịch vụ chung: Service SWCs cung cấp các dịch vụ chung như quản lý bộ nhớ, giao tiếp mạng, quản lý thời gian, và các dịch vụ khác.
- Hỗ trợ các SWCs khác: Các SWCs khác sử dụng các dịch vụ này để thực hiện các chức năng của mình.
- Tăng khả năng tái sử dụng: Bằng cách cung cấp các dịch vụ chung, Service SWCs giúp tăng khả năng tái sử dụng của các SWCs khác.
Ví dụ về Service SWCs
- SWC quản lý bộ nhớ: Phân bổ và giải phóng bộ nhớ cho các SWCs khác.
- SWC giao tiếp mạng: Quản lý kết nối mạng, gửi và nhận dữ liệu qua mạng.
- SWC quản lý thời gian: Cung cấp các dịch vụ liên quan đến thời gian như đồng bộ hóa, hẹn giờ.
Đặc điểm nổi bật
- Tính trừu tượng hóa: Service SWCs thường cung cấp một giao diện trừu tượng cho các dịch vụ, giúp che giấu các chi tiết triển khai.
- Tính độc lập: Service SWCs thường độc lập với các SWCs khác, có thể được sử dụng trong nhiều hệ thống khác nhau.
- Hiệu suất cao: Service SWCs thường được tối ưu hóa để cung cấp hiệu suất tốt.
Cấu trúc và Thành phần
Giống như các SWCs khác, Service SWCs cũng bao gồm các thành phần chính:
- Ports: Để giao tiếp với các SWCs khác.
- Runnables: Chứa các đoạn mã thực hiện các dịch vụ.
- Data Elements: Lưu trữ các dữ liệu cần thiết cho quá trình cung cấp dịch vụ.
- Internal Behavior: Mô tả cách các runnable tương tác với nhau bên trong SWC.
Lợi ích của việc sử dụng Service SWCs
- Tăng khả năng tái sử dụng: Giảm sự trùng lặp mã và tăng hiệu suất phát triển.
- Tăng tính mô đun hóa: Dễ dàng thay thế hoặc cập nhật các dịch vụ mà không ảnh hưởng đến các SWCs khác.
- Cải thiện khả năng quản lý: Dễ dàng quản lý và bảo trì các dịch vụ chung.
Kết luận
Service SWCs là một thành phần quan trọng trong kiến trúc AUTOSAR, cung cấp các dịch vụ nền tảng cho các SWCs khác. Bằng cách sử dụng Service SWCs, hệ thống phần mềm trở nên mô đun hóa, dễ quản lý và tái sử dụng hơn.
6. Các Thành Phần Phần Mềm Cảm Biến/Bộ Điều Khiển (Sensor/Actuator SWCs)
Giới thiệu
Sensor/Actuator SWCs là những thành phần phần mềm đóng vai trò cầu nối giữa thế giới vật lý và thế giới số trong một hệ thống ô tô. Chúng chịu trách nhiệm giao tiếp trực tiếp với các cảm biến và bộ truyền động, chuyển đổi tín hiệu vật lý thành dữ liệu số và ngược lại.
Vai trò và Chức năng
- Giao tiếp với phần cứng: Sensor/Actuator SWCs là giao diện chính giữa các SWCs cấp cao và các thiết bị vật lý.
- Thu thập dữ liệu từ cảm biến: Các SWC loại sensor chịu trách nhiệm đọc dữ liệu từ các cảm biến và chuyển đổi thành dạng có thể sử dụng bởi các SWCs khác.
- Điều khiển bộ truyền động: Các SWC loại actuator nhận dữ liệu từ các SWCs cấp cao và điều khiển các bộ truyền động để thực hiện các hành động.
- Xử lý tín hiệu cơ bản: Thực hiện các phép tính cơ bản như lọc, bù trừ, hiệu chuẩn trên dữ liệu cảm biến hoặc tín hiệu điều khiển.
Ví dụ về Sensor/Actuator SWCs
- SWC cảm biến nhiệt độ: Đọc giá trị nhiệt độ từ cảm biến, chuyển đổi thành giá trị số và cung cấp cho các SWCs khác.
- SWC điều khiển động cơ điện: Nhận tín hiệu điều khiển từ SWC cấp cao, tính toán các tham số điều khiển và gửi tín hiệu điều khiển đến động cơ điện.
- SWC cảm biến áp suất lốp: Đọc áp suất lốp từ các cảm biến, thực hiện các phép tính cần thiết và cung cấp thông tin cho hệ thống giám sát áp suất lốp.
Đặc điểm nổi bật
- Gần gũi với phần cứng: Sensor/Actuator SWCs thường có liên kết chặt chẽ với các đặc tính của phần cứng.
- Thời gian thực: Nhiều Sensor/Actuator SWCs cần đáp ứng yêu cầu thời gian thực để đảm bảo an toàn và hiệu suất hệ thống.
- Xử lý tín hiệu cơ bản: Thường thực hiện các thuật toán đơn giản để xử lý dữ liệu cảm biến hoặc tín hiệu điều khiển.
Cấu trúc và Thành phần
Giống như các SWCs khác, Sensor/Actuator SWCs cũng bao gồm các thành phần chính:
- Ports: Để giao tiếp với các SWCs khác và các thiết bị ngoại vi.
- Runnables: Chứa các đoạn mã thực hiện các chức năng như đọc/ghi dữ liệu, xử lý tín hiệu.
- Data Elements: Lưu trữ các dữ liệu tạm thời và cấu hình.
- Internal Behavior: Mô tả cách các runnable tương tác với nhau bên trong SWC.
Lợi ích của việc sử dụng Sensor/Actuator SWCs
- Tính mô đun hóa: Giúp tách biệt phần mềm liên quan đến cảm biến và bộ truyền động.
- Tái sử dụng: Có thể tái sử dụng một số Sensor/Actuator SWCs trong các dự án khác nhau.
- Dễ bảo trì: Giúp đơn giản hóa quá trình bảo trì và cập nhật phần mềm.
Kết luận
Sensor/Actuator SWCs là thành phần quan trọng trong việc kết nối thế giới vật lý với hệ thống điều khiển của xe. Chúng đảm bảo rằng dữ liệu từ các cảm biến được xử lý đúng cách và các lệnh điều khiển được gửi đến các bộ truyền động một cách chính xác.
7. Complex Device Drivers (CDD)
Giới thiệu
Trình điều khiển thiết bị phức tạp (Complex Device Drivers – CDDs) là các thành phần phần mềm đóng vai trò cầu nối giữa kiến trúc chuẩn hóa cao của AUTOSAR và các phần cứng phức tạp, thường là độc quyền trong hệ thống ô tô. Chúng không được chuẩn hóa chính thức bởi AUTOSAR nhưng cần thiết để tương tác với các thành phần phần cứng yêu cầu xử lý đặc biệt hoặc tối ưu hóa hiệu suất.
Đặc trưng chính
- Không chuẩn hóa: CDDs không được định nghĩa bởi tiêu chuẩn AUTOSAR.
- Truy cập trực tiếp phần cứng: Chúng thường tương tác trực tiếp với các thanh ghi phần cứng, ngắt và các ngoại vi điều khiển vi mô cụ thể.
- Quan trọng về hiệu suất: CDDs rất quan trọng đối với các ứng dụng đòi hỏi hiệu suất cao, độ trễ thấp hoặc khả năng thời gian thực.
- Có thể tùy chỉnh: Chúng được điều chỉnh cho các thành phần phần cứng cụ thể và yêu cầu hệ thống.
- Tích hợp với AUTOSAR: CDDs tương tác với các thành phần AUTOSAR thông qua các giao diện chuẩn hóa.
Trường hợp sử dụng điển hình
- Tích hợp cảm biến phức tạp: Xử lý các cảm biến với xử lý dữ liệu phức tạp hoặc yêu cầu các thuật toán hiệu chuẩn đặc biệt.
- Điều khiển bộ truyền động hiệu suất cao: Quản lý các bộ truyền động với yêu cầu thời gian chính xác hoặc chiến lược điều khiển phức tạp.
- Tích hợp hệ thống di sản: Điều chỉnh các thành phần không phải AUTOSAR với môi trường AUTOSAR.
- Giao diện truyền thông tối ưu hóa: Triển khai các giao thức truyền thông tùy chỉnh cho phần cứng cụ thể.
Thách thức và cân nhắc
- Độ phức tạp: CDDs có thể phức tạp do sự phức tạp của tương tác phần cứng.
- Ràng buộc thời gian thực: Đáp ứng các yêu cầu về thời gian nghiêm ngặt là điều cần thiết.
- Khả năng di chuyển: CDDs thường dành riêng cho nền tảng, hạn chế khả năng tái sử dụng.
- Tích hợp với AUTOSAR: Đảm bảo tương tác liền mạch với các thành phần AUTOSAR khác có thể khó khăn.
- Kiểm thử và xác thực: Kiểm tra kỹ lưỡng là rất quan trọng do tương tác trực tiếp với phần cứng.
Quan hệ với AUTOSAR
Mặc dù CDDs không chính thức là một phần của tiêu chuẩn AUTOSAR nhưng chúng tương tác với các thành phần AUTOSAR khác thông qua các giao diện được xác định rõ ràng. Điều này cho phép chúng phù hợp với kiến trúc hệ thống tổng thể và hưởng lợi từ các lợi thế của AUTOSAR, chẳng hạn như tính mô đun và khả năng tái sử dụng.
Ví dụ: Hệ thống quản lý pin (BMS)
Một BMS thường yêu cầu một CDD để xử lý tương tác cấp thấp với các tế bào pin, bao gồm đo điện áp, cảm biến nhiệt độ, cân bằng tế bào và giao tiếp với IC quản lý pin. CDD sẽ cung cấp một giao diện cấp cao hơn cho ứng dụng BMS để truy cập dữ liệu pin và các chức năng điều khiển.
Kết luận
Trình điều khiển thiết bị phức tạp (CDDs) là thành phần quan trọng trong các hệ thống ô tô hiện đại, cho phép tích hợp phần cứng phức tạp với kiến trúc AUTOSAR chuẩn hóa. Chúng cung cấp sự linh hoạt để xử lý các yêu cầu phần cứng chuyên biệt trong khi duy trì khả năng tương thích với toàn bộ hệ thống.
8. Thành phần Ghép Nối (Composition Component)

Thành phần ghép nối (Composition Component) trong AUTOSAR là một khái niệm quan trọng để mô tả cấu trúc và tương tác giữa các thành phần phần mềm trong một hệ thống. Nó đóng vai trò như một container để nhóm các thành phần phần mềm khác (SWCs) và định nghĩa cách chúng kết nối và tương tác với nhau.
Khái niệm cơ bản
- Thành phần phần mềm (SWC): Là đơn vị phần mềm độc lập, thực hiện một chức năng cụ thể.
- Thành phần ghép nối: Là một tập hợp các SWCs được cấu hình và kết nối với nhau để thực hiện một chức năng tổng thể.
Vai trò của Thành phần Ghép Nối
- Cấu trúc hệ thống: Tổ chức các SWCs thành các nhóm có ý nghĩa theo chức năng hoặc phạm vi.
- Quản lý tương tác: Định nghĩa cách các SWCs giao tiếp thông qua các cổng (ports).
- Tái sử dụng: Cho phép tái sử dụng các thành phần ghép nối trong các hệ thống khác nhau.
- Phân chia hệ thống: Hỗ trợ phân chia hệ thống thành các mô-đun độc lập.
Các loại Thành phần Ghép Nối
- Thành phần ghép nối cấp cao (Top-level Composition): Là thành phần ghép nối chính của hệ thống, bao gồm tất cả các thành phần khác.
- Thành phần ghép nối con (Sub-composition): Là thành phần ghép nối nằm bên trong một thành phần ghép nối khác.
Ví dụ
Một thành phần ghép nối điều khiển động cơ có thể bao gồm các SWC sau:
- Cảm biến tốc độ động cơ
- Cảm biến mô-men xoắn
- Bộ điều khiển động cơ
- Actuator điều khiển van tiết lưu
Các SWC này được kết nối thông qua các cổng để trao đổi dữ liệu và điều khiển.
Lợi ích của Thành phần Ghép Nối
- Tính mô đun hóa: Dễ dàng quản lý và bảo trì hệ thống.
- Tái sử dụng: Tăng khả năng tái sử dụng các thành phần.
- Hiệu suất: Tối ưu hóa hiệu suất thông qua cấu hình hợp lý.
- Khả năng mở rộng: Dễ dàng mở rộng hệ thống bằng cách thêm hoặc xóa các thành phần.
Thách thức
- Độ phức tạp: Quản lý các thành phần ghép nối lớn có thể phức tạp.
- Hiệu suất: Cần cân nhắc hiệu suất khi thiết kế cấu trúc ghép nối.
- Kiểm thử: Đảm bảo tính đúng đắn của các tương tác giữa các thành phần.
Kết luận
Thành phần ghép nối là một khái niệm quan trọng trong AUTOSAR để thiết kế và quản lý các hệ thống phần mềm phức tạp. Nó giúp tổ chức, cấu trúc và quản lý các thành phần phần mềm một cách hiệu quả.
9. Tính Mô-đun và Tái Sử Dụng
Một trong những lợi ích lớn nhất của các AUTOSAR SWCs là tính mô-đun và khả năng tái sử dụng cao. Các thành phần phần mềm trong AUTOSAR được thiết kế theo cách mô-đun, nghĩa là mỗi SWC thực hiện một chức năng cụ thể và có thể được phát triển, kiểm thử, và bảo trì độc lập.
- Tiết Kiệm Thời Gian Phát Triển: Do các SWC được xây dựng với khả năng tái sử dụng, chúng có thể dễ dàng được tích hợp vào các dự án khác mà không cần phải viết lại từ đầu. Điều này giúp rút ngắn thời gian phát triển phần mềm.
- Giảm Chi Phí: Bằng cách tái sử dụng các SWC đã tồn tại, các nhà phát triển có thể tiết kiệm được chi phí phát triển và kiểm thử, cũng như giảm thiểu rủi ro lỗi phát sinh do việc viết mã mới.
- Khả Năng Tương Thích: Các SWC được thiết kế để hoạt động trên nhiều nền tảng phần cứng khác nhau. Điều này đảm bảo rằng phần mềm có thể dễ dàng được chuyển từ nền tảng này sang nền tảng khác mà không cần phải thực hiện nhiều thay đổi lớn.
- Dễ Dàng Bảo Trì và Nâng Cấp: Với tính mô-đun, khi có sự thay đổi hoặc nâng cấp trong hệ thống, các SWC có thể được thay thế hoặc cập nhật mà không ảnh hưởng đến toàn bộ hệ thống, giúp cho việc bảo trì trở nên đơn giản hơn.
- Hợp Tác Giữa Các Nhà Cung Cấp: Trong ngành công nghiệp ô tô, có rất nhiều OEMs (Nhà sản xuất thiết bị gốc) và Suppliers (Nhà cung cấp). Tính mô-đun và khả năng tái sử dụng của AUTOSAR SWCs giúp các nhà cung cấp có thể dễ dàng hợp tác, chia sẻ các thành phần phần mềm mà không gặp phải vấn đề về tương thích.
10. Tích hợp và cấu hình
Trong AUTOSAR, tích hợp và cấu hình là hai bước quan trọng để đảm bảo rằng các Software Components (SWCs) hoạt động hài hòa trong một hệ thống phức tạp, như một chiếc xe hơi hiện đại.
Tích Hợp (Integration)
- Mô tả: Tích hợp là quá trình kết nối các SWC lại với nhau và với các thành phần khác của hệ thống, như Basic Software (BSW) và phần cứng. Trong môi trường AUTOSAR, việc tích hợp yêu cầu sự phối hợp chặt chẽ giữa các nhà phát triển phần mềm ứng dụng (Application Software) và các nhà phát triển phần mềm cơ bản (Basic Software).
- Quá Trình Tích Hợp:
- Liên Kết Giao Diện: Các SWC giao tiếp với nhau thông qua các giao diện được xác định rõ ràng. Quá trình tích hợp đảm bảo rằng các giao diện này được liên kết chính xác để dữ liệu có thể truyền tải một cách mượt mà giữa các SWC.
- Kiểm Tra Tương Thích: Trước khi tích hợp, cần kiểm tra tính tương thích giữa các SWC để đảm bảo chúng hoạt động cùng nhau mà không xảy ra xung đột.
- Tích Hợp Hệ Thống: Sau khi các SWC được tích hợp, hệ thống cần được kiểm thử tổng thể để đảm bảo rằng mọi chức năng đều hoạt động như mong đợi.
Cấu Hình (Configuration)
- Mô tả: Cấu hình là quá trình thiết lập các tham số và cài đặt cho các SWC và BSW để phù hợp với yêu cầu cụ thể của hệ thống hoặc ứng dụng. Trong AUTOSAR, nhiều phần của hệ thống cần được cấu hình một cách linh hoạt để có thể tương thích với các phần cứng khác nhau và đáp ứng các yêu cầu cụ thể của từng dự án.
- Quá Trình Cấu Hình:
- Thiết Lập Tham Số: Các SWC thường có các tham số cấu hình để điều chỉnh hành vi của chúng, chẳng hạn như tốc độ truyền thông, độ phân giải của cảm biến, hoặc ngưỡng kích hoạt của một hệ thống an toàn.
- Công Cụ Cấu Hình: AUTOSAR cung cấp các công cụ cấu hình (như DaVinci Configurator) để giúp các kỹ sư dễ dàng thiết lập các tham số này mà không cần phải chỉnh sửa mã nguồn.
- Quản Lý Biến Môi Trường: Cấu hình cũng bao gồm việc quản lý các biến môi trường để đảm bảo rằng hệ thống hoạt động đúng trong các điều kiện khác nhau (như nhiệt độ, áp suất, hoặc điện áp).
Tầm Quan Trọng của Tích Hợp và Cấu Hình
- Đảm Bảo Sự Tương Thích: Việc tích hợp và cấu hình chính xác đảm bảo rằng tất cả các thành phần trong hệ thống hoạt động mượt mà cùng nhau mà không gặp phải vấn đề tương thích.
- Tối Ưu Hóa Hiệu Suất: Cấu hình cho phép điều chỉnh hệ thống để tối ưu hóa hiệu suất, đảm bảo rằng hệ thống đáp ứng yêu cầu về tốc độ, độ chính xác, và độ tin cậy.
- Linh Hoạt và Tái Sử Dụng: Nhờ quá trình cấu hình, các SWC có thể được tái sử dụng trên nhiều dự án khác nhau chỉ với một vài thay đổi nhỏ trong tham số, tiết kiệm thời gian và chi phí phát triển.
Kết luận
AUTOSAR Software Components là những khối xây dựng quan trọng của phần mềm ô tô hiện đại, mang lại sự linh hoạt, tính mô-đun, và khả năng tái sử dụng cao. Với AUTOSAR, các nhà phát triển có thể tạo ra các hệ thống phần mềm phức tạp, đáng tin cậy, và có khả năng thích ứng với nhiều nền tảng và yêu cầu khác nhau trong ngành công nghiệp ô tô.
7. Ví Dụ Minh Họa Software Components – SWCs
Ví Dụ 1: Điều Khiển Động Cơ

Hãy tưởng tượng một hệ thống điều khiển động cơ ô tô, trong đó có các SWC như sau:
- SWC1: Engine Control Unit (ECU)
- Chức năng: Điều khiển hoạt động của động cơ dựa trên các thông tin từ các cảm biến và yêu cầu từ người lái.
- Ports:
- Input Ports: Nhận dữ liệu từ cảm biến tốc độ động cơ, cảm biến nhiệt độ, v.v.
- Output Ports: Gửi tín hiệu điều khiển đến hệ thống phun nhiên liệu và hệ thống đánh lửa.
- SWC2: Accelerator Pedal Position Sensor (APPS)
- Chức năng: Đo vị trí bàn đạp ga và gửi dữ liệu này đến ECU để tính toán lực đẩy cần thiết.
- Ports:
- Output Ports: Gửi dữ liệu vị trí bàn đạp ga đến ECU.
- SWC3: Fuel Injector Control
- Chức năng: Điều khiển kim phun nhiên liệu dựa trên tín hiệu từ ECU.
- Ports:
- Input Ports: Nhận tín hiệu điều khiển từ ECU.
Trong ví dụ này, SWC2 gửi dữ liệu vị trí bàn đạp ga đến SWC1 (ECU) qua các Sender-Receiver Ports. SWC1 xử lý dữ liệu và điều chỉnh hệ thống phun nhiên liệu bằng cách gửi tín hiệu điều khiển đến SWC3.
Ví Dụ 2: Hệ Thống Đèn Pha Tự Động

Một hệ thống đèn pha tự động trong xe có thể bao gồm các SWC sau:
- SWC1: Light Sensor (Cảm Biến Ánh Sáng)
- Chức năng: Đo cường độ ánh sáng bên ngoài và gửi dữ liệu đến SWC điều khiển đèn pha.
- Ports:
- Output Ports: Gửi dữ liệu cường độ ánh sáng đến SWC điều khiển đèn pha.
- SWC2: Headlight Control (Điều Khiển Đèn Pha)
- Chức năng: Điều khiển đèn pha dựa trên dữ liệu từ cảm biến ánh sáng và yêu cầu từ người lái.
- Ports:
- Input Ports: Nhận dữ liệu từ SWC cảm biến ánh sáng.
- Output Ports: Gửi tín hiệu bật/tắt đèn pha đến SWC điều khiển đèn pha.
- SWC3: Headlight Actuator (Bộ Điều Khiển Đèn Pha)
- Chức năng: Thực hiện việc bật/tắt đèn pha theo tín hiệu điều khiển từ SWC điều khiển đèn pha.
- Ports:
- Input Ports: Nhận tín hiệu điều khiển từ SWC điều khiển đèn pha.
Trong ví dụ này, SWC1 đo cường độ ánh sáng và gửi dữ liệu đến SWC2. SWC2 quyết định bật hoặc tắt đèn pha và gửi tín hiệu điều khiển đến SWC3 để thực hiện thao tác.
8. AUTOSAR Classic and Adaptive Platforms
AUTOSAR, một tiêu chuẩn kiến trúc phần mềm cho ngành công nghiệp ô tô, cung cấp hai nền tảng chính để đáp ứng các yêu cầu khác nhau của hệ thống xe hơi: Classic Platform và Adaptive Platform.
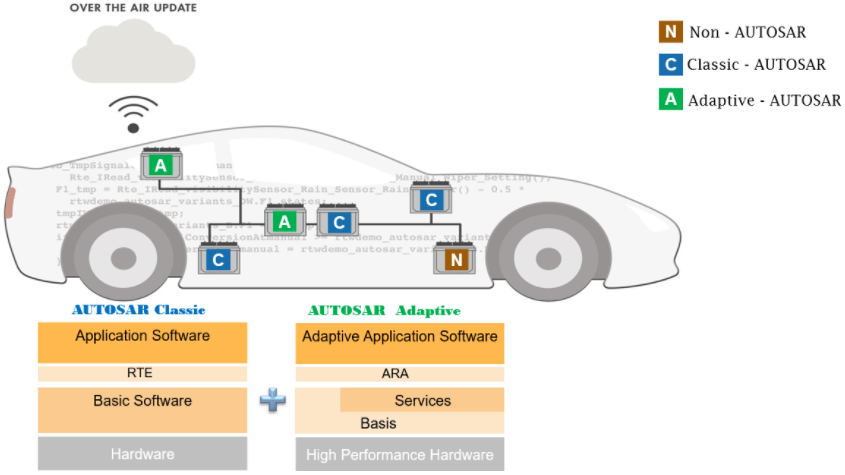
AUTOSAR Classic Platform
Classic Platform là nền tảng AUTOSAR truyền thống, được thiết kế chủ yếu cho các hệ thống điều khiển nhúng với yêu cầu về hiệu suất và độ tin cậy cao. Nền tảng này chủ yếu được sử dụng cho các ECU (Electronic Control Units) có phần cứng hạn chế và yêu cầu thời gian thực.
Các Thành Phần Chính:
- Application Layer: Bao gồm các phần mềm ứng dụng cụ thể cho từng chức năng như điều khiển động cơ, hệ thống phanh, và các hệ thống điều khiển khác.
- Runtime Environment (RTE): Cung cấp giao diện giữa các phần mềm ứng dụng và lớp phần mềm cơ bản (Basic Software – BSW). RTE giúp các phần mềm ứng dụng tương tác với các dịch vụ BSW mà không cần phải biết chi tiết về phần cứng.
- Basic Software (BSW): Bao gồm các lớp như Microcontroller Abstraction Layer (MCAL), ECU Abstraction Layer, và Service Layer. BSW cung cấp các dịch vụ cơ bản và giao diện để tương tác với phần cứng vi điều khiển và các hệ thống ngoại vi.
Đặc Điểm:
- Thời Gian Thực (Real-Time): Hỗ trợ các yêu cầu về thời gian thực cho các ứng dụng quan trọng.
- Hiệu Suất Cao: Được tối ưu hóa cho các hệ thống với tài nguyên phần cứng hạn chế.
- Tính Tương Thích: Đảm bảo tính tương thích và dễ dàng tích hợp với các hệ thống phần mềm hiện có.
Kết Luận:
- Dành cho các ECU truyền thống: Được thiết kế cho các Electronic Control Units (ECU) truyền thống, nơi phần mềm được nhúng sâu và yêu cầu thời gian thực nghiêm ngặt.
- Kiến trúc tĩnh: Có một cấu trúc tĩnh với các thành phần phần mềm được xác định trước và cấu hình tĩnh.
- Hệ điều hành tùy chỉnh: Sử dụng một hệ điều hành tùy chỉnh được tối ưu hóa cho các ứng dụng nhúng.
- Ưu điểm: Khả năng tương thích rộng rãi, ổn định và hiệu quả về mặt chi phí.
- Nhược điểm: Ít linh hoạt cho các tính năng mới, khó khăn trong việc cập nhật phần mềm.
AUTOSAR Adaptive Platform
Adaptive Platform là nền tảng AUTOSAR mới hơn, được thiết kế để đáp ứng các yêu cầu ngày càng cao của các hệ thống ô tô hiện đại, đặc biệt là các hệ thống điều khiển phức tạp và các ứng dụng tiên tiến như xe tự lái và hệ thống thông tin giải trí.
Các Thành Phần Chính:
- Application Layer: Bao gồm các ứng dụng tự do, không bị ràng buộc bởi yêu cầu thời gian thực, có thể là các dịch vụ phức tạp và các chức năng điều khiển tiên tiến.
- Adaptive Application Interface (AAI): Cung cấp giao diện cho các ứng dụng để tương tác với nền tảng Adaptive. AAI hỗ trợ các ứng dụng đa nhiệm và tự động mở rộng.
- Service-Oriented Architecture (SOA): Cung cấp khả năng tích hợp linh hoạt các dịch vụ và ứng dụng. SOA cho phép các ứng dụng tương tác qua các dịch vụ mạng và giao diện.
- Middleware: Cung cấp các dịch vụ trung gian để quản lý các ứng dụng và dịch vụ. Middleware hỗ trợ các tính năng như phát hiện dịch vụ và quản lý tài nguyên.
Đặc Điểm:
- Tính Linh Hoạt (Flexibility): Hỗ trợ các ứng dụng phức tạp và có khả năng mở rộng cao.
- Tính Tương Thích Cao (High Compatibility): Được thiết kế để tích hợp với các hệ thống hiện đại và các công nghệ mới.
- Hỗ Trợ Đa Nhiệm (Multitasking Support): Có khả năng hỗ trợ các ứng dụng đa nhiệm và quản lý tài nguyên động.
Kết Luận
- Dành cho các hệ thống phức tạp: Được thiết kế cho các hệ thống phức tạp như ADAS (Advanced Driver Assistance Systems) và xe tự lái, yêu cầu tính linh hoạt, khả năng mở rộng và cập nhật nhanh chóng.
- Kiến trúc động: Có một kiến trúc động với các thành phần phần mềm có thể được tải và cấu hình lại trong thời gian chạy.
- Hệ điều hành POSIX: Sử dụng các hệ điều hành tương thích POSIX như QNX, Linux để tăng tính linh hoạt và khả năng mở rộng.
- Ưu điểm: Linh hoạt, khả năng mở rộng, hỗ trợ các tính năng mới, dễ dàng cập nhật phần mềm.
- Nhược điểm: Yêu cầu phần cứng mạnh mẽ hơn, phức tạp hơn trong triển khai.
So Sánh giữa Classic và Adaptive Platform
Kết Luận
Cả hai nền tảng AUTOSAR – Classic và Adaptive – đều có vai trò quan trọng trong ngành công nghiệp ô tô, đáp ứng các yêu cầu khác nhau của các hệ thống điều khiển. Classic Platform phù hợp với các hệ thống nhúng và yêu cầu thời gian thực, trong khi Adaptive Platform hướng đến các ứng dụng tiên tiến và phức tạp hơn với tính linh hoạt và khả năng mở rộng cao.
9. Công Cụ AUTOSAR
1. Công cụ AUTOSAR
Công cụ AUTOSAR là tập hợp các phần mềm được thiết kế để hỗ trợ việc phát triển, cấu hình và quản lý các thành phần phần mềm ô tô theo tiêu chuẩn AUTOSAR. Những công cụ này giúp các kỹ sư và nhà phát triển thiết kế, cấu hình, kiểm thử và triển khai các thành phần phần mềm một cách hiệu quả trong hệ thống tuân thủ AUTOSAR. Các chức năng chính của công cụ AUTOSAR bao gồm:
- Công cụ Thiết kế và Mô hình hóa: Các công cụ này hỗ trợ việc tạo các thành phần phần mềm, giao diện và kiến trúc hệ thống theo mô hình AUTOSAR. Chúng cung cấp môi trường mô hình hóa trực quan để thiết kế các thành phần phần mềm và sự tương tác của chúng.
- Công cụ Cấu hình: Dùng để cấu hình các lớp Phần mềm Cơ bản (BSW), Môi trường Thực thi (RTE) và các thành phần quan trọng khác trong hệ thống dựa trên AUTOSAR. Chúng đảm bảo rằng mọi cấu hình đều tuân thủ tiêu chuẩn AUTOSAR và hỗ trợ bộ vi điều khiển cụ thể được sử dụng.
- Công cụ Kiểm thử và Xác thực: Các công cụ này cho phép kiểm thử và xác thực các thành phần phần mềm để đảm bảo chúng đáp ứng các yêu cầu về chức năng và hiệu suất. Chúng rất quan trọng để xác minh rằng phần mềm hoạt động chính xác dưới các điều kiện khác nhau.
- Công cụ Sinh mã: Tự động sinh mã nguồn từ các mô hình và cấu hình, giúp giảm bớt công sức lập trình thủ công, giảm thiểu lỗi và đảm bảo sự nhất quán với tiêu chuẩn AUTOSAR.
- Công cụ Tích hợp: Hỗ trợ tích hợp các thành phần phần mềm khác nhau vào một hệ thống thống nhất, đảm bảo rằng tất cả các thành phần hoạt động cùng nhau như mong đợi.
2. Giao hàng/Gói từ Nhà cung cấp
Trong bối cảnh AUTOSAR, giao hàng/gói đề cập đến việc phân phối các thành phần phần mềm AUTOSAR, công cụ và tài liệu liên quan đến khách hàng hoặc người dùng cuối. Các nhà cung cấp đóng vai trò quan trọng trong việc cung cấp các gói này, bao gồm các mô-đun phần mềm cần thiết, cấu hình và hỗ trợ để triển khai các hệ thống dựa trên AUTOSAR.
Các khía cạnh chính của Giao hàng/Gói:
- Gói Phần mềm: Bao gồm các mô-đun Phần mềm Cơ bản (BSW), các tệp cấu hình AUTOSAR và các thành phần cần thiết khác để xây dựng một hệ thống tuân thủ AUTOSAR. Các nhà cung cấp cung cấp các gói này cho các nhà sản xuất (OEM) và các nhà cung cấp cấp 1.
- Tài liệu: Cùng với phần mềm, các nhà cung cấp cung cấp tài liệu chi tiết mô tả cách sử dụng, cấu hình và tích hợp các thành phần phần mềm trong môi trường AUTOSAR. Tài liệu này rất quan trọng để các nhà phát triển hiểu cách triển khai phần mềm đúng cách.
- Hỗ trợ và Bảo trì: Các nhà cung cấp thường cung cấp hỗ trợ và bảo trì liên tục cho các gói được giao. Điều này bao gồm các bản cập nhật, bản vá và hỗ trợ tích hợp và xử lý sự cố.
Các nhà cung cấp công cụ AUTOSAR nổi bật:
- Vector Informatik: Cung cấp các công cụ AUTOSAR toàn diện như DaVinci Developer cho thiết kế và cấu hình, và CANoe cho kiểm thử và xác thực.
- ETAS: Cung cấp các công cụ như ISOLAR cho phát triển tuân thủ AUTOSAR, bao gồm cấu hình, sinh mã và kiểm thử.
- Electrobit: Cung cấp EB tresos, bộ công cụ để cấu hình và tích hợp các mô-đun Phần mềm Cơ bản của AUTOSAR.
- Mentor Graphics: Cung cấp các giải pháp AUTOSAR thông qua nền tảng Mentor Embedded, bao gồm các công cụ thiết kế, cấu hình và xác thực.
Những nhà cung cấp này cung cấp các công cụ và gói phần mềm cần thiết cho các công ty ô tô, giúp họ phát triển và duy trì các hệ thống tuân thủ AUTOSAR một cách hiệu quả.
10. BSW/MCAL Từ Các Nhà Cung Cấp
1. BSW/MCAL từ các Nhà cung cấp Vi điều khiển:
- BSW (Basic Software – Phần mềm cơ bản): Là lớp phần mềm thấp nhất trong kiến trúc AUTOSAR, bao gồm các mô-đun phần mềm cơ bản cần thiết để quản lý và điều khiển các phần cứng của hệ thống. Các mô-đun này bao gồm các chức năng như giao tiếp, quản lý bộ nhớ, điều khiển I/O, và nhiều chức năng khác.
- MCAL (Microcontroller Abstraction Layer – Lớp trừu tượng hóa vi điều khiển): Là một phần quan trọng của BSW, MCAL đóng vai trò trừu tượng hóa phần cứng vi điều khiển, giúp các lớp phần mềm phía trên (như RTE và Application Layer) có thể hoạt động độc lập với phần cứng. MCAL cung cấp các driver cho các bộ phận của vi điều khiển như bộ nhớ, giao tiếp, quản lý I/O, và các thiết bị ngoại vi.
Các nhà cung cấp vi điều khiển (ví dụ: Infineon, NXP, Renesas, STMicroelectronics) thường cung cấp các gói BSW/MCAL được tối ưu hóa cho các sản phẩm vi điều khiển cụ thể của họ. Những gói phần mềm này bao gồm các driver và công cụ cấu hình, giúp các nhà phát triển dễ dàng tích hợp và sử dụng vi điều khiển trong hệ thống tuân thủ AUTOSAR.
2. BSW/MCAL từ Vector:
- Vector Informatik: Là một trong những nhà cung cấp hàng đầu về giải pháp phần mềm và công cụ cho ngành công nghiệp ô tô, Vector cung cấp các công cụ và dịch vụ để phát triển, cấu hình và kiểm thử các hệ thống dựa trên AUTOSAR.
- DaVinci Configurator Pro: Là một công cụ cấu hình BSW được sử dụng rộng rãi, cho phép các nhà phát triển cấu hình và tích hợp các mô-đun BSW vào hệ thống của họ. Nó hỗ trợ việc cấu hình MCAL, RTE và các mô-đun khác của BSW theo chuẩn AUTOSAR.
- MICROSAR: Là một giải pháp BSW toàn diện của Vector, bao gồm MCAL và các mô-đun BSW khác. MICROSAR hỗ trợ nhiều loại vi điều khiển và có thể được tùy chỉnh theo nhu cầu cụ thể của khách hàng.
3. BSW/MCAL từ Nguồn lực bên ngoài (Outsourcing):
- Outsourcing (Gia công phần mềm): Một số công ty ô tô hoặc nhà cung cấp cấp 1 có thể lựa chọn gia công phát triển BSW/MCAL cho các đối tác hoặc nhà cung cấp dịch vụ phần mềm bên ngoài. Điều này giúp họ tập trung vào các lĩnh vực cốt lõi của mình mà vẫn đảm bảo các thành phần phần mềm tuân thủ tiêu chuẩn AUTOSAR.
- Lợi ích: Gia công phần mềm cho phép các công ty tận dụng chuyên môn của các nhà cung cấp dịch vụ chuyên về phát triển BSW/MCAL. Điều này có thể giúp giảm chi phí, rút ngắn thời gian phát triển và đảm bảo chất lượng phần mềm.
- Thách thức: Việc gia công phần mềm yêu cầu quản lý chặt chẽ để đảm bảo rằng sản phẩm cuối cùng đáp ứng được các tiêu chuẩn về chất lượng và bảo mật. Sự phụ thuộc vào các nhà cung cấp dịch vụ bên ngoài cũng có thể gây ra những rủi ro về quản lý dự án và kiểm soát chất lượng.
Nhìn chung, BSW/MCAL từ các nhà cung cấp vi điều khiển, Vector, và các nguồn lực bên ngoài đều đóng vai trò quan trọng trong việc phát triển các hệ thống ô tô hiện đại, giúp các nhà sản xuất đáp ứng các yêu cầu khắt khe của tiêu chuẩn AUTOSAR.
Tổng Kết
AUTOSAR (AUTomotive Open System ARchitecture) là một tiêu chuẩn toàn cầu trong ngành công nghiệp ô tô, được thiết kế để tạo ra một nền tảng phần mềm chung, giúp các nhà sản xuất và nhà cung cấp dễ dàng phát triển và tích hợp các hệ thống điều khiển điện tử (ECU) trong xe hơi. Chương này đã khám phá những khía cạnh chính của AUTOSAR, bao gồm:
- Cấu Trúc Phần Mềm AUTOSAR:
- AUTOSAR được tổ chức thành ba lớp chính: Lớp Ứng Dụng (Application Layer), Môi Trường Thực Thi (Runtime Environment – RTE) và Lớp Phần Mềm Cơ Bản (Basic Software – BSW).
- Lớp Ứng Dụng chứa các thành phần phần mềm (SWCs) thực hiện các chức năng cụ thể của hệ thống.
- RTE đóng vai trò là cầu nối giữa Lớp Ứng Dụng và BSW, cung cấp giao diện tiêu chuẩn cho giao tiếp nội bộ.
- BSW là lớp thấp nhất, cung cấp các dịch vụ cơ bản như quản lý bộ nhớ, giao tiếp và điều khiển I/O, và được phân thành nhiều mô-đun khác nhau, bao gồm cả MCAL (Microcontroller Abstraction Layer).
- MCAL và BSW:
- MCAL đóng vai trò quan trọng trong việc trừu tượng hóa phần cứng, giúp các lớp phần mềm phía trên hoạt động mà không phụ thuộc vào phần cứng cụ thể.
- Các nhà cung cấp vi điều khiển, như Infineon, NXP, Renesas, cung cấp các gói BSW/MCAL được tùy chỉnh cho các vi điều khiển của họ.
- Vector và các công ty khác cũng cung cấp các công cụ và dịch vụ hỗ trợ cấu hình và triển khai BSW theo chuẩn AUTOSAR.
- AUTOSAR Classic và Adaptive:
- AUTOSAR Classic tập trung vào các hệ thống nhúng với yêu cầu thời gian thực cứng, sử dụng ngôn ngữ lập trình C và chạy trên hệ điều hành Bareboard.
- AUTOSAR Adaptive dành cho các ứng dụng yêu cầu tính linh hoạt cao, giao tiếp với các nguồn tài nguyên bên ngoài, sử dụng C++ và chạy trên hệ điều hành POSIX.
- Công Cụ và Nhà Cung Cấp AUTOSAR:
- Các công cụ phát triển và kiểm thử, như DaVinci Configurator Pro và MICROSAR từ Vector, hỗ trợ quá trình phát triển phần mềm theo chuẩn AUTOSAR.
- Outsourcing cũng là một lựa chọn để phát triển BSW/MCAL, giúp các công ty tập trung vào những lĩnh vực cốt lõi trong khi vẫn đảm bảo tuân thủ các tiêu chuẩn chất lượng.
Kết luận: AUTOSAR không chỉ là một tiêu chuẩn kỹ thuật, mà còn là một nền tảng hợp tác giữa các công ty trong ngành ô tô. Nó giúp tiêu chuẩn hóa quá trình phát triển phần mềm, giảm thiểu sự phức tạp và chi phí, đồng thời tăng cường khả năng tái sử dụng và tương thích của các thành phần phần mềm trong hệ thống ô tô.
Bài Viết Liên Quan:
 [Automotive SW] Ngày 4: Kiến Trúc Phần Mềm và Hệ Thống Điều Khiển Trong Ô Tô
[Automotive SW] Ngày 4: Kiến Trúc Phần Mềm và Hệ Thống Điều Khiển Trong Ô Tô
 [Automotive SW] Ngày 3: Các Giai Đoạn Chính Trong Phát Triển Phần Mềm Automotive
[Automotive SW] Ngày 3: Các Giai Đoạn Chính Trong Phát Triển Phần Mềm Automotive
 [Automotive SW] Ngày 2: Quy Trình Phát Triển Phần Mềm Theo Tiêu Chuẩn ASPICE
[Automotive SW] Ngày 2: Quy Trình Phát Triển Phần Mềm Theo Tiêu Chuẩn ASPICE
 [Automotive SW] Ngày 1: Tổng quan về phát triển phần mềm trong ngành Automotive
[Automotive SW] Ngày 1: Tổng quan về phát triển phần mềm trong ngành Automotive
 [Automotive] Ngày 5: Hệ Thống Truyền Động và Hộp Số (Transmission, DriveTrain)
[Automotive] Ngày 5: Hệ Thống Truyền Động và Hộp Số (Transmission, DriveTrain)
 [Automotive] Ngày 4: Động Cơ (Engine)
[Automotive] Ngày 4: Động Cơ (Engine)
 [Automotive] Ngày 3: Thân Xe và Khung Xe (Body and Frame)
[Automotive] Ngày 3: Thân Xe và Khung Xe (Body and Frame)
 [Automotive] Ngày 2: Cấu Trúc và Các Hệ Thống Chính trong Ô Tô
[Automotive] Ngày 2: Cấu Trúc và Các Hệ Thống Chính trong Ô Tô
 [Automotive] Ngày 1: Tổng quan ngành Công Nghệ Ô Tô
[Automotive] Ngày 1: Tổng quan ngành Công Nghệ Ô Tô